 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample-Efficient Robot Skill Learning for Construction Tasks: Benchmarking Hierarchical Reinforcement Learning and Vision-Language-Action VLA Model
Dec 16, 2025



This study evaluates two leading approaches for teaching construction robots new skills to understand their applicability for construction automation: a Vision-Language-Action (VLA) model and Reinforcement Learning (RL) methods. The goal is to understand both task performance and the practical effort needed to deploy each approach on real jobs. The authors developed two teleoperation interfaces to control the robots and collect the demonstrations needed, both of which proved effective for training robots for long-horizon and dexterous tasks. In addition, the authors conduct a three-stage evaluation. First, the authors compare a Multi-Layer Perceptron (MLP) policy with a Deep Q-network (DQN) imitation model to identify the stronger RL baseline, focusing on model performance, generalization, and a pick-up experiment. Second, three different VLA models are trained in two different scenarios and compared with each other. Third, the authors benchmark the selected RL baseline against the VLA model using computational and sample-efficiency measures and then a robot experiment on a multi-stage panel installation task that includes transport and installation. The VLA model demonstrates strong generalization and few-shot capability, achieving 60% and 100% success in the pickup phase. In comparison, DQN can be made robust but needs additional noise during tuning, which increases the workload. Overall, the findings indicate that VLA offers practical advantages for changing tasks by reducing programming effort and enabling useful performance with minimal data, while DQN provides a viable baseline when sufficient tuning effort is acceptable.
Cloud-Based Hierarchical Imitation Learning for Scalable Transfer of Construction Skills from Human Workers to Assisting Robots
Sep 20, 2023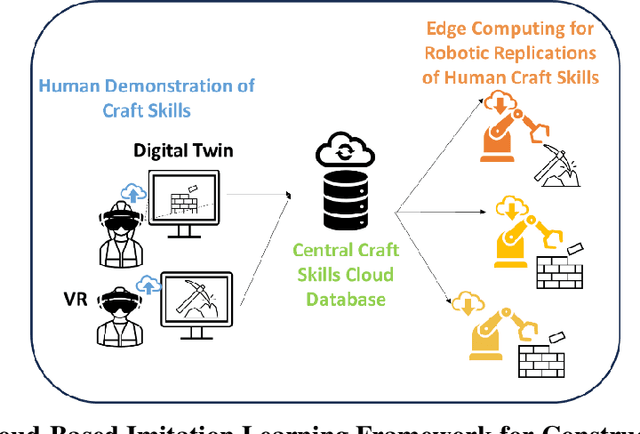

Assigning repetitive and physically-demanding construction tasks to robots can alleviate human workers's exposure to occupational injuries. Transferring necessary dexterous and adaptive artisanal construction craft skills from workers to robots is crucial for the successful delegation of construction tasks and achieving high-quality robot-constructed work. Predefined motion planning scripts tend to generate rigid and collision-prone robotic behaviors in unstructured construction site environments. In contrast, Imitation Learning (IL) offers a more robust and flexible skill transfer scheme. However, the majority of IL algorithms rely on human workers to repeatedly demonstrate task performance at full scale, which can be counterproductive and infeasible in the case of construction work. To address this concern, this paper proposes an immersive, cloud robotics-based virtual demonstration framework that serves two primary purposes. First, it digitalizes the demonstration process, eliminating the need for repetitive physical manipulation of heavy construction objects. Second, it employs a federated collection of reusable demonstrations that are transferable for similar tasks in the future and can thus reduce the requirement for repetitive illustration of tasks by human agents. Additionally, to enhance the trustworthiness, explainability, and ethical soundness of the robot training, this framework utilizes a Hierarchical Imitation Learning (HIL) model to decompose human manipulation skills into sequential and reactive sub-skills. These two layers of skills are represented by deep generative models, enabling adaptive control of robot actions. By delegating the physical strains of construction work to human-trained robots, this framework promotes the inclusion of workers with diverse physical capabilities and educational backgrounds within the construction industry.
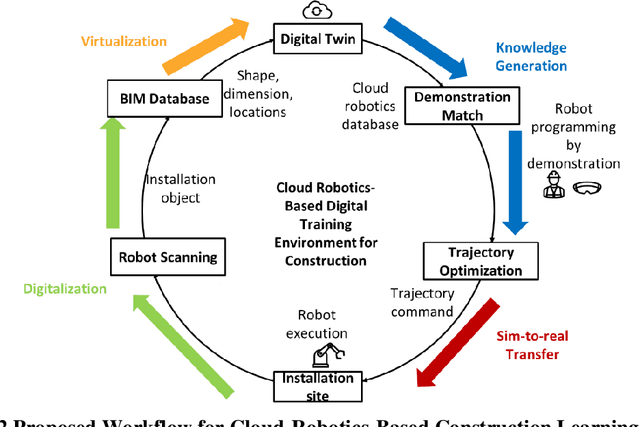
Enabling BIM-Driven Robotic Construction Workflows with Closed-Loop Digital Twins
Jun 16, 2023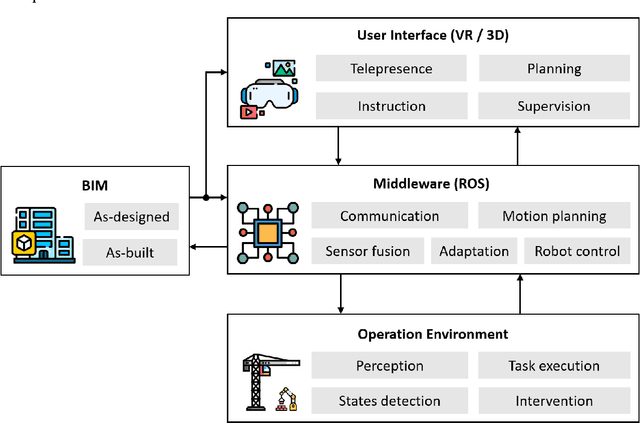
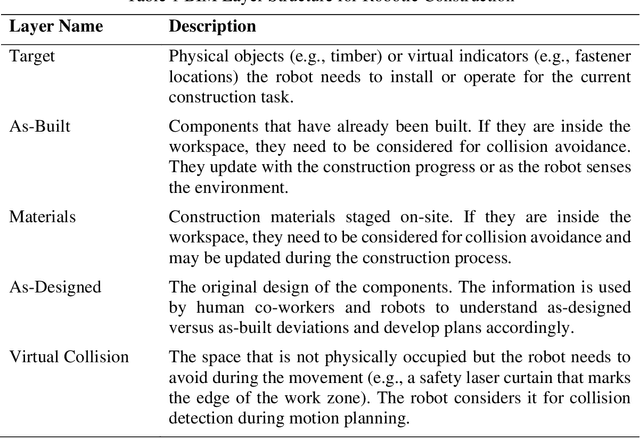
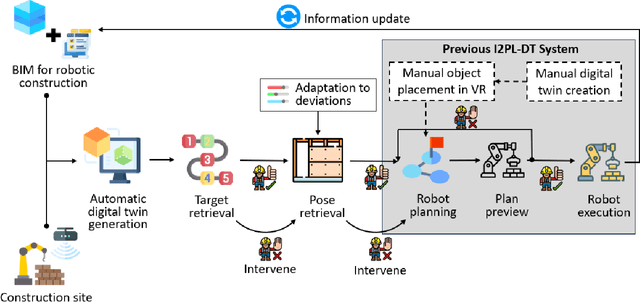
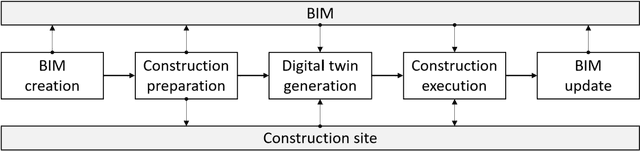
Robots can greatly alleviate physical demands on construction workers while enhancing both the productivity and safety of construction projects. Leveraging a Building Information Model (BIM) offers a natural and promising approach to drive a robotic construction workflow. However, because of uncertainties inherent on construction sites, such as discrepancies between the designed and as-built workpieces, robots cannot solely rely on the BIM to guide field construction work. Human workers are adept at improvising alternative plans with their creativity and experience and thus can assist robots in overcoming uncertainties and performing construction work successfully. This research introduces an interactive closed-loop digital twin system that integrates a BIM into human-robot collaborative construction workflows. The robot is primarily driven by the BIM, but it adaptively adjusts its plan based on actual site conditions while the human co-worker supervises the process. If necessary, the human co-worker intervenes in the robot's plan by changing the task sequence or target position, requesting a new motion plan, or modifying the construction component(s)/material(s) to help the robot navigate uncertainties. To investigate the physical deployment of the system, a drywall installation case study is conducted with an industrial robotic arm in a laboratory. In addition, a block pick-and-place experiment is carried out to evaluate system performance. Integrating the flexibility of human workers and the autonomy and accuracy afforded by the BIM, the system significantly increases the robustness of construction robots in the performance of field construction work.