 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplex Events Recognition under Uncertainty in a Sensor Network
Nov 01, 2014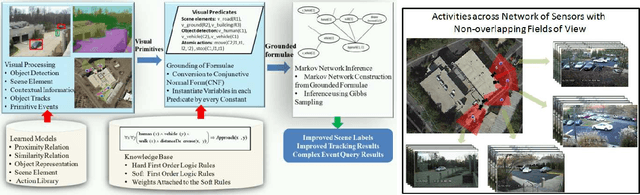

Automated extraction of semantic information from a network of sensors for cognitive analysis and human-like reasoning is a desired capability in future ground surveillance systems. We tackle the problem of complex decision making under uncertainty in network information environment, where lack of effective visual processing tools, incomplete domain knowledge frequently cause uncertainty in the visual primitives, leading to sub-optimal decisions. While state-of-the-art vision techniques exist in detecting visual entities (humans, vehicles and scene elements) in an image, a missing functionality is the ability to merge the information to reveal meaningful information for high level inference. In this work, we develop a probabilistic first order predicate logic(FOPL) based reasoning system for recognizing complex events in synchronized stream of videos, acquired from sensors with non-overlapping fields of view. We adopt Markov Logic Network(MLN) as a tool to model uncertainty in observations, and fuse information extracted from heterogeneous data in a probabilistically consistent way. MLN overcomes strong dependence on pure empirical learning by incorporating domain knowledge, in the form of user-defined rules and confidences associated with them. This work demonstrates that the MLN based decision control system can be made scalable to model statistical relations between a variety of entities and over long video sequences. Experiments with real-world data, under a variety of settings, illustrate the mathematical soundness and wide-ranging applicability of our approach.