 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffordance-based Reinforcement Learning for Urban Driving
Jan 15, 2021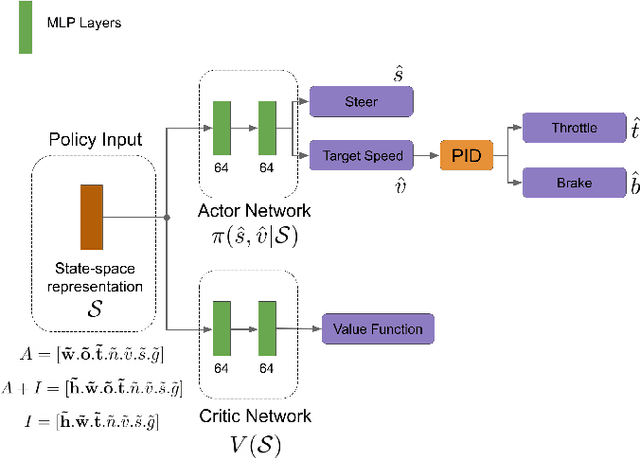

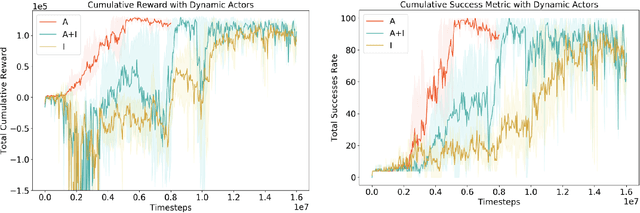

Traditional autonomous vehicle pipelines that follow a modular approach have been very successful in the past both in academia and industry, which has led to autonomy deployed on road. Though this approach provides ease of interpretation, its generalizability to unseen environments is limited and hand-engineering of numerous parameters is required, especially in the prediction and planning systems. Recently, deep reinforcement learning has been shown to learn complex strategic games and perform challenging robotic tasks, which provides an appealing framework for learning to drive. In this work, we propose a deep reinforcement learning framework to learn optimal control policy using waypoints and low-dimensional visual representations, also known as affordances. We demonstrate that our agents when trained from scratch learn the tasks of lane-following, driving around inter-sections as well as stopping in front of other actors or traffic lights even in the dense traffic setting. We note that our method achieves comparable or better performance than the baseline methods on the original and NoCrash benchmarks on the CARLA simulator.