 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmenting Ego-Vehicle for Traffic Near-Miss and Accident Classification Dataset using Manipulating Conditional Style Translation
Jan 06, 2023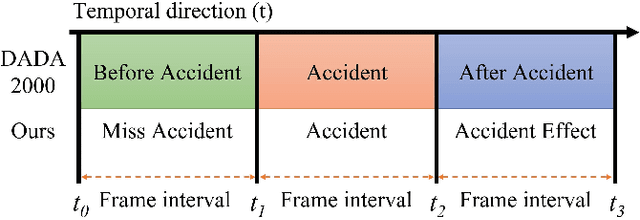
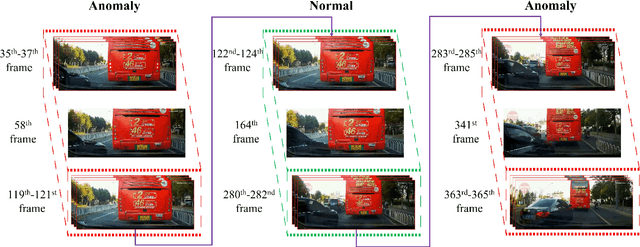
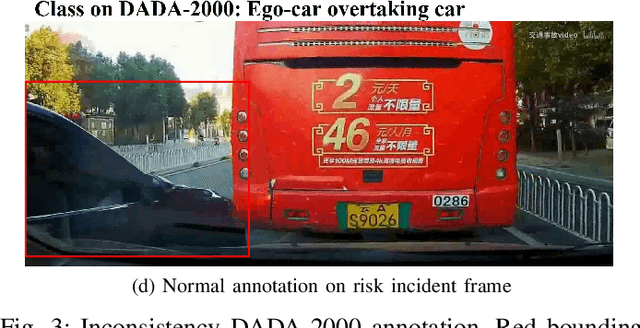
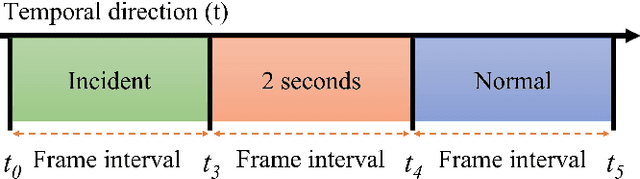
To develop the advanced self-driving systems, many researchers are focusing to alert all possible traffic risk cases from closed-circuit television (CCTV) and dashboard-mounted cameras. Most of these methods focused on identifying frame-by-frame in which an anomaly has occurred, but they are unrealized, which road traffic participant can cause ego-vehicle leading into collision because of available annotation dataset only to detect anomaly on traffic video. Near-miss is one type of accident and can be defined as a narrowly avoided accident. However, there is no difference between accident and near-miss at the time before the accident happened, so our contribution is to redefine the accident definition and re-annotate the accident inconsistency on DADA-2000 dataset together with near-miss. By extending the start and end time of accident duration, our annotation can precisely cover all ego-motions during an incident and consistently classify all possible traffic risk accidents including near-miss to give more critical information for real-world driving assistance systems. The proposed method integrates two different components: conditional style translation (CST) and separable 3-dimensional convolutional neural network (S3D). CST architecture is derived by unsupervised image-to-image translation networks (UNIT) used for augmenting the re-annotation DADA-2000 dataset to increase the number of traffic risk accident videos and to generalize the performance of video classification model on different types of conditions while S3D is useful for video classification to prove dataset re-annotation consistency. In evaluation, the proposed method achieved a significant improvement result by 10.25% positive margin from the baseline model for accuracy on cross-validation analysis.
* 8 pages, conference
Automatic Controlling Fish Feeding Machine using Feature Extraction of Nutriment and Ripple Behavior
Aug 15, 2022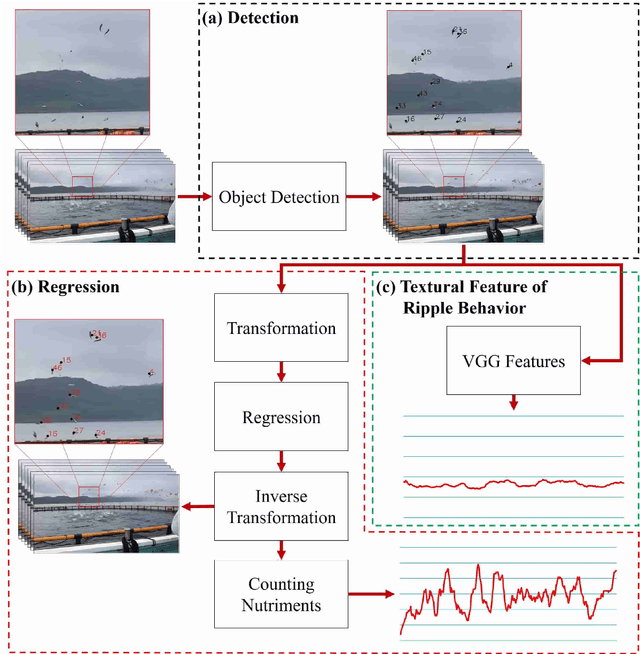
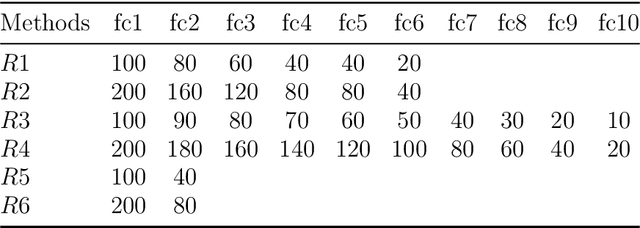
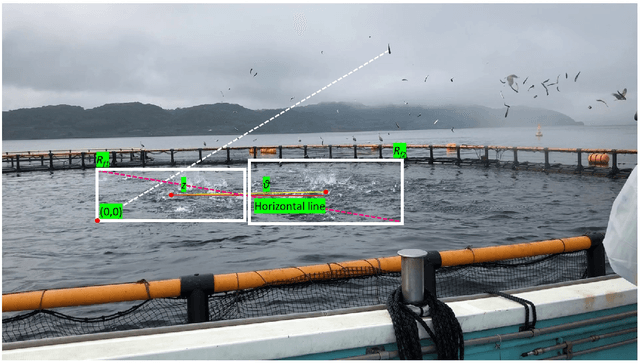
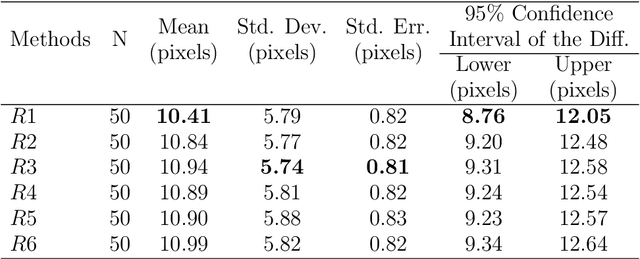
Controlling fish feeding machine is challenging problem because experienced fishermen can adequately control based on assumption. To build robust method for reasonable application, we propose automatic controlling fish feeding machine based on computer vision using combination of counting nutriments and estimating ripple behavior using regression and textural feature, respectively. To count number of nutriments, we apply object detection and tracking methods to acknowledge the nutriments moving to sea surface. Recently, object tracking is active research and challenging problem in computer vision. Unfortunately, the robust tracking method for multiple small objects with dense and complex relationships is unsolved problem in aquaculture field with more appearance creatures. Based on the number of nutriments and ripple behavior, we can control fish feeding machine which consistently performs well in real environment. Proposed method presents the agreement for automatic controlling fish feeding by the activation graphs and textural feature of ripple behavior. Our tracking method can precisely track the nutriments in next frame comparing with other methods. Based on computational time, proposed method reaches 3.86 fps while other methods spend lower than 1.93 fps. Quantitative evaluation can promise that proposed method is valuable for aquaculture fish farm with widely applied to real environment.
Tuna Nutriment Tracking using Trajectory Mapping in Application to Aquaculture Fish Tank
Mar 10, 2021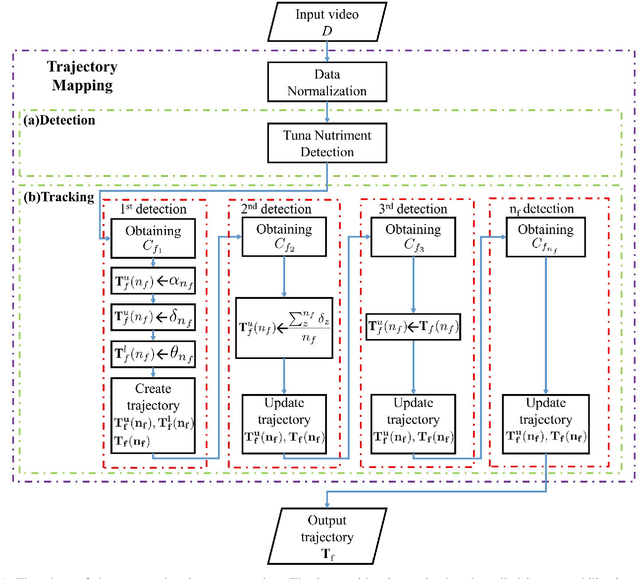
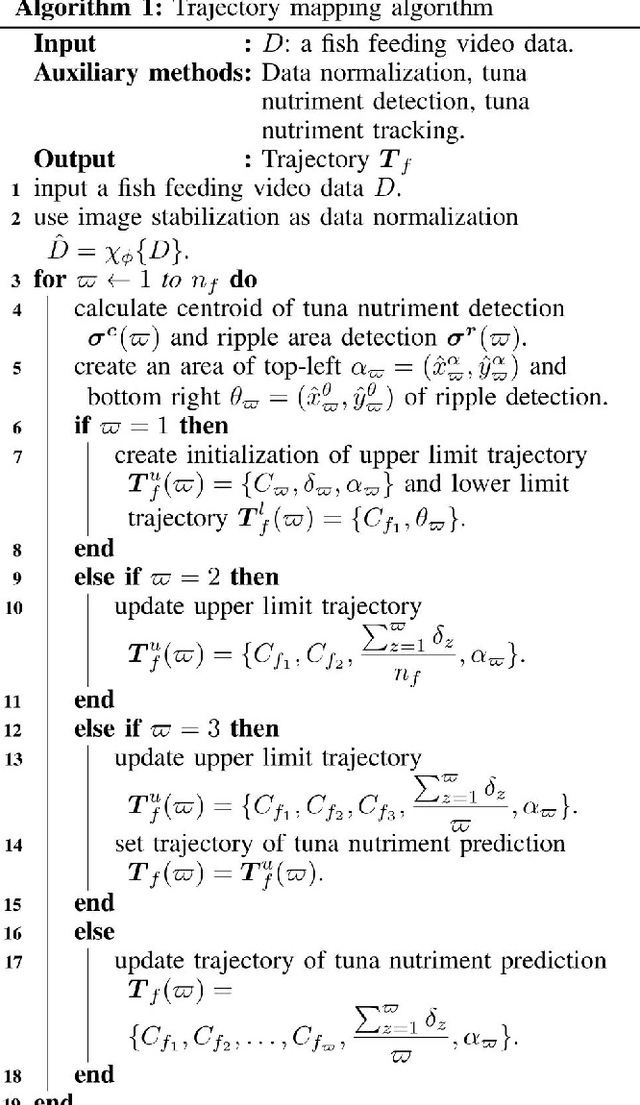
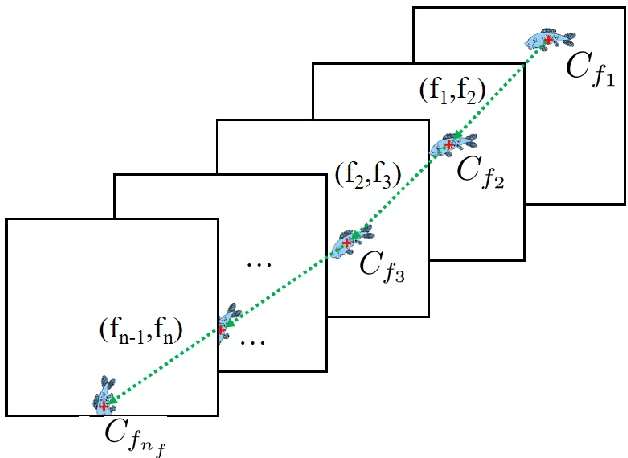
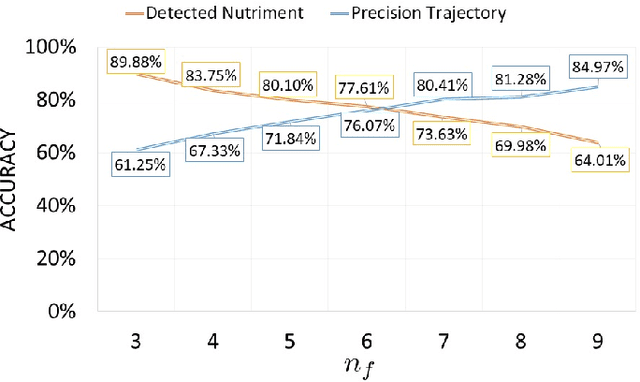
The cost of fish feeding is usually around 40 percent of total production cost. Estimating a state of fishes in a tank and adjusting an amount of nutriments play an important role to manage cost of fish feeding system. Our approach is based on tracking nutriments on videos collected from an active aquaculture fish farm. Tracking approach is applied to acknowledge movement of nutriment to understand more about the fish behavior. Recently, there has been increasing number of researchers focused on developing tracking algorithms to generate more accurate and faster determination of object. Unfortunately, recent studies have shown that efficient and robust tracking of multiple objects with complex relations remain unsolved. Hence, focusing to develop tracking algorithm in aquaculture is more challenging because tracked object has a lot of aquatic variant creatures. By following aforementioned problem, we develop tuna nutriment tracking based on the classical minimum cost problem which consistently performs well in real environment datasets. In evaluation, the proposed method achieved 21.32 pixels and 3.08 pixels for average error distance and standard deviation, respectively. Quantitative evaluation based on the data generated by human annotators shows that the proposed method is valuable for aquaculture fish farm and can be widely applied to real environment datasets.