 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Exploration Process Adjustment for Safe Reinforcement Learning with Joint Chance Constraint Satisfaction
Mar 05, 2021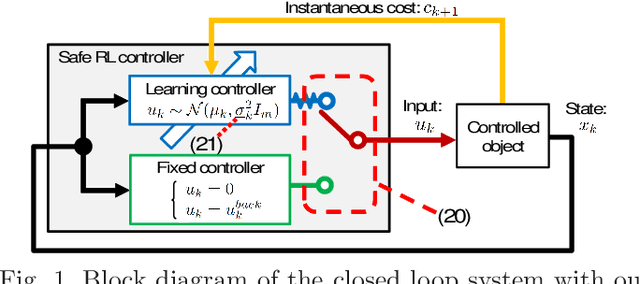
In reinforcement learning (RL) algorithms, exploratory control inputs are used during learning to acquire knowledge for decision making and control, while the true dynamics of a controlled object is unknown. However, this exploring property sometimes causes undesired situations by violating constraints regarding the state of the controlled object. In this paper, we propose an automatic exploration process adjustment method for safe RL in continuous state and action spaces utilizing a linear nominal model of the controlled object. Specifically, our proposed method automatically selects whether the exploratory input is used or not at each time depending on the state and its predicted value as well as adjusts the variance-covariance matrix used in the Gaussian policy for exploration. We also show that our exploration process adjustment method theoretically guarantees the satisfaction of the constraints with the pre-specified probability, that is, the satisfaction of a joint chance constraint at every time. Finally, we illustrate the validity and the effectiveness of our method through numerical simulation.