 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Discrimination Learning for Gaussian Process Models
Nov 21, 2022The paper covers the design and analysis of experiments to discriminate between two Gaussian process models, such as those widely used in computer experiments, kriging, sensor location and machine learning. Two frameworks are considered. First, we study sequential constructions, where successive design (observation) points are selected, either as additional points to an existing design or from the beginning of observation. The selection relies on the maximisation of the difference between the symmetric Kullback Leibler divergences for the two models, which depends on the observations, or on the mean squared error of both models, which does not. Then, we consider static criteria, such as the familiar log-likelihood ratios and the Fr\'echet distance between the covariance functions of the two models. Other distance-based criteria, simpler to compute than previous ones, are also introduced, for which, considering the framework of approximate design, a necessary condition for the optimality of a design measure is provided. The paper includes a study of the mathematical links between different criteria and numerical illustrations are provided.
Adaptive Experimental Design for Path-following Performance Assessment of Unmanned Vehicles
Nov 14, 2016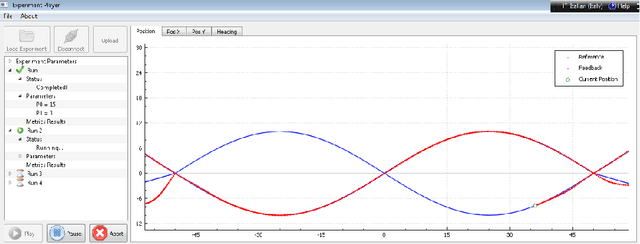
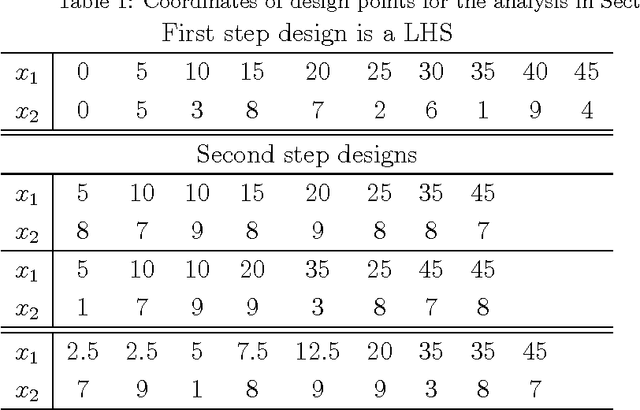
The definition of Good Experimental Methodologies (GEMs) in robotics is a topic of widespread interest due also to the increasing employment of robots in everyday civilian life. The present work contributes to the ongoing discussion on GEMs for Unmanned Surface Vehicles (USVs). It focuses on the definition of GEMs and provides specific guidelines for path-following experiments. Statistically designed experiments (DoE) offer a valid basis for developing an empirical model of the system being investigated. A two-step adaptive experimental procedure for evaluating path-following performance and based on DoE, is tested on the simulator of the Charlie USV. The paper argues the necessity of performing extensive simulations prior to the execution of field trials.