 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Reconstruction in Noisy Agricultural Environments: A Bayesian Optimization Perspective for View Planning
Sep 29, 20233D reconstruction is a fundamental task in robotics that gained attention due to its major impact in a wide variety of practical settings, including agriculture, underwater, and urban environments. An important approach for this task, known as view planning, is to judiciously place a number of cameras in positions that maximize the visual information improving the resulting 3D reconstruction. Circumventing the need for a large number of arbitrary images, geometric criteria can be applied to select fewer yet more informative images to markedly improve the 3D reconstruction performance. Nonetheless, incorporating the noise of the environment that exists in various real-world scenarios into these criteria may be challenging, particularly when prior information about the noise is not provided. To that end, this work advocates a novel geometric function that accounts for the existing noise, relying solely on a relatively small number of noise realizations without requiring its closed-form expression. With no analytic expression of the geometric function, this work puts forth a Bayesian optimization algorithm for accurate 3D reconstruction in the presence of noise. Numerical tests on noisy agricultural environments showcase the impressive merits of the proposed approach for 3D reconstruction with even a small number of available cameras.
Pre-Clustering Point Clouds of Crop Fields Using Scalable Methods
Jul 22, 2021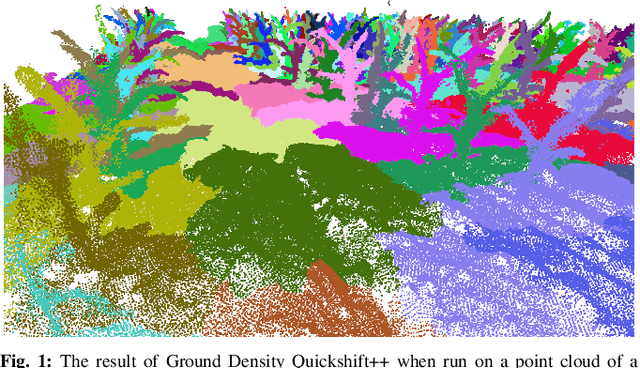
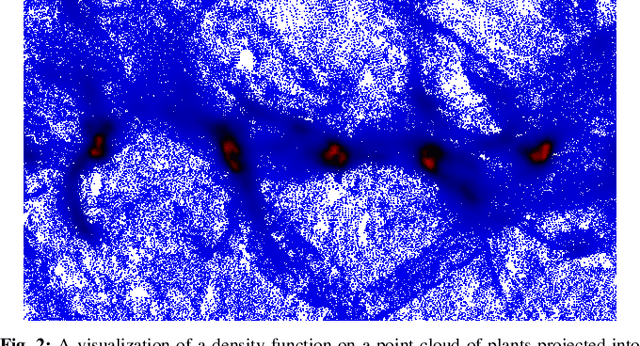
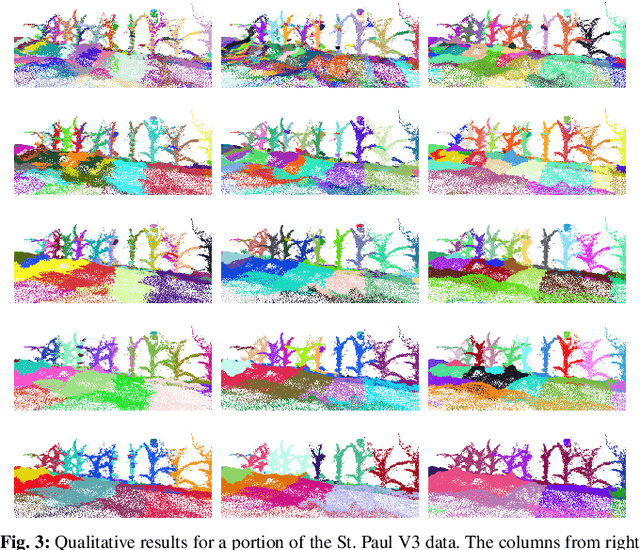
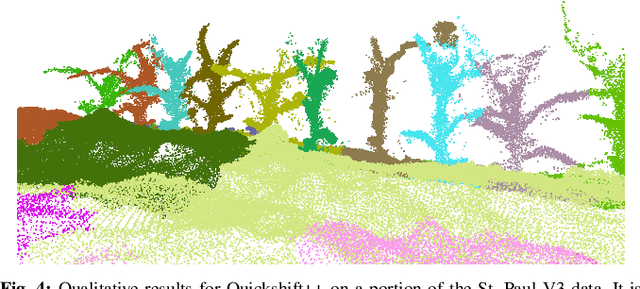
In order to apply the recent successes of automated plant phenotyping and machine learning on a large scale, efficient and general algorithms must be designed to intelligently split crop fields into small, yet actionable, portions that can then be processed by more complex algorithms. In this paper we notice a similarity between the current state-of-the-art for this problem and a commonly used density-based clustering algorithm, Quickshift. Exploiting this similarity we propose a number of novel, application specific algorithms with the goal of producing a general and scalable plant segmentation algorithm. The novel algorithms proposed in this work are shown to produce quantitatively better results than the current state-of-the-art while being less sensitive to input parameters and maintaining the same algorithmic time complexity. When incorporated into field-scale phenotyping systems, the proposed algorithms should work as a drop in replacement that can greatly improve the accuracy of results while ensuring that performance and scalability remain undiminished.