 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSliding Window Neural Generated Tracking Based on Measurement Model
Jun 10, 2023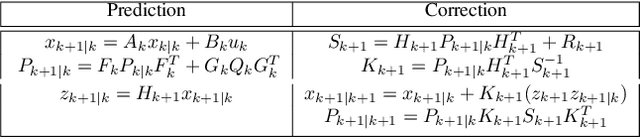
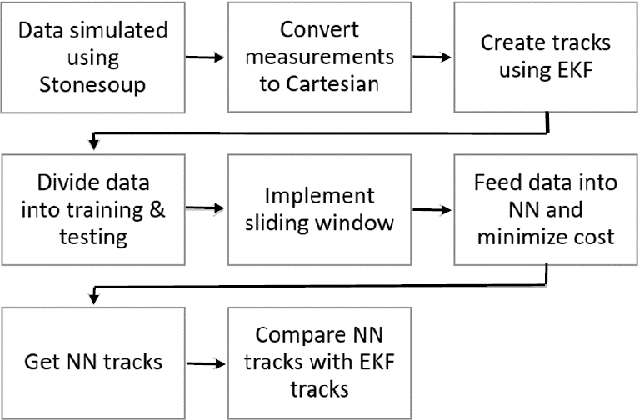
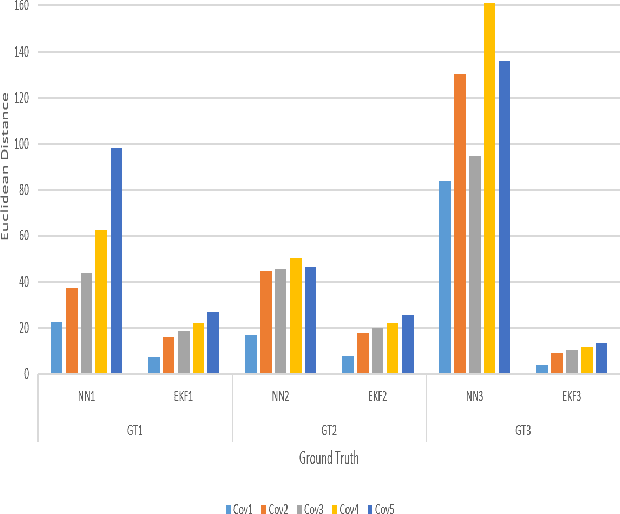

In the pursuit of further advancement in the field of target tracking, this paper explores the efficacy of a feedforward neural network in predicting drones tracks, aiming to eventually, compare the tracks created by the well-known Kalman filter and the ones created by our proposed neural network. The unique feature of our proposed neural network tracker is that it is using only a measurement model to estimate the next states of the track. Object model selection and linearization is one of the challenges that always face in the tracking process. The neural network uses a sliding window to incorporate the history of measurements when applying estimations of the track values. The testing results are comparable to the ones generated by the Kalman filter, especially for the cases where there is low measurement covariance. The complexity of linearization is avoided when using this proposed model.