 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Tire-Based Slip Ratio Estimation Using Different Machine Learning Algorithms
Jun 09, 2021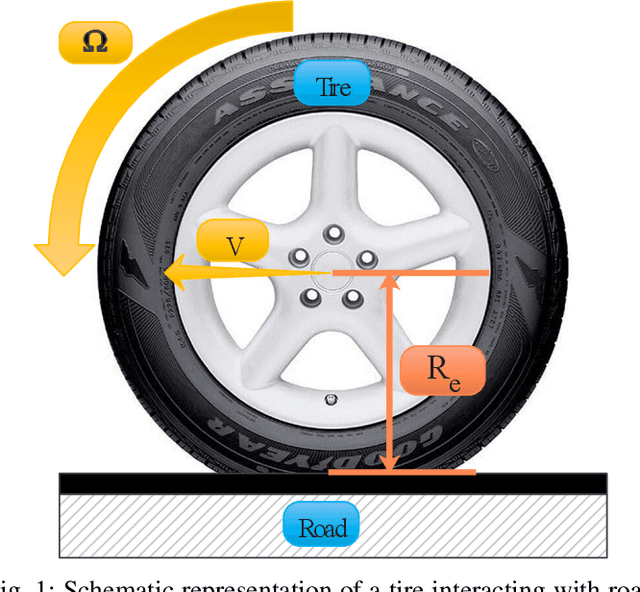
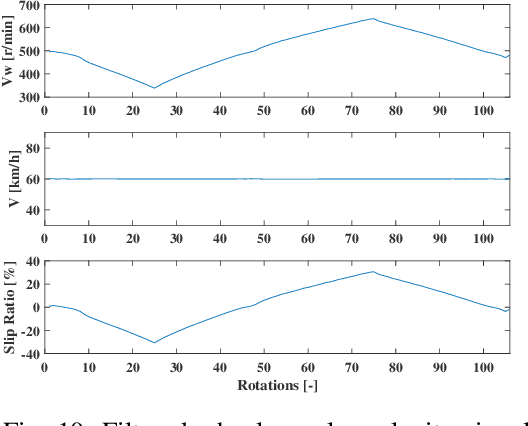
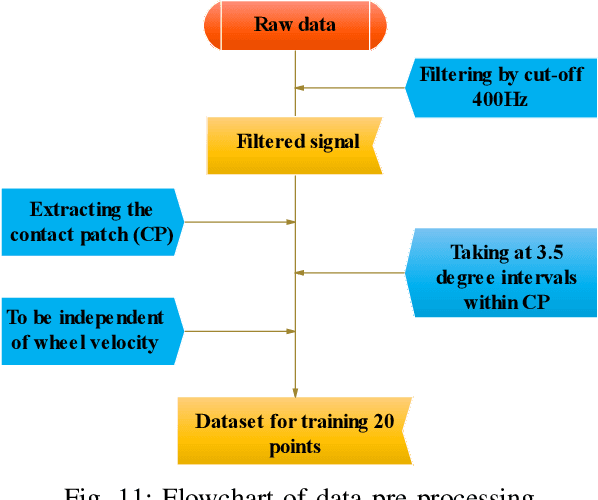
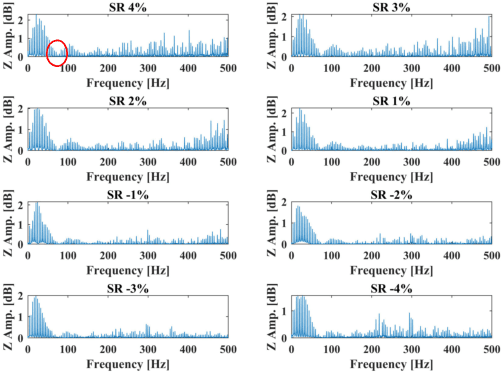
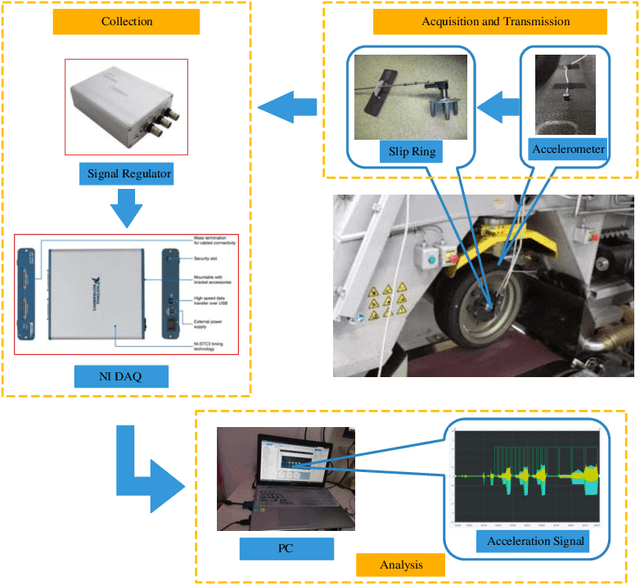
Estimation of the longitudinal slip ratio of tires is important in boosting the control performance of the vehicle under driving and braking conditions. In this paper, the slip ratio is estimated using four machine learning algorithms (Neural Network, Gradient Boosting Machine, Random Forest and Support Vector Machine) based on the acceleration signals from the tri-axial MEMS accelerometers utilized in the intelligent tire system. The experimental data are collected through the MTS experimental platform. The corresponding acceleration signals within the tire contact patch are extracted after filtering to be used for the training the aforesaid machine learning algorithms. A comparison is provided between the implemented ML algorithms using a 10-fold CV. NRMS errors in the CV results indicate that NN has the highest accuracy in comparison with other techniques. The NRSM errors of NN, GBM, RF, and SVM are 2.59\%, 3.30\%, 4.21\%, and 5.34\%, respectively. Among these techniques, GBM has a more stable results as it has the smallest output variance. The present study with the fusion of intelligent tire system and machine learning algorithms paves the way for the accurate estimation of tire slip ratio, which is critical for the development of reliable vehicle control algorithms.
Lateral Force Prediction using Gaussian Process Regression for Intelligent Tire Systems
Sep 25, 2020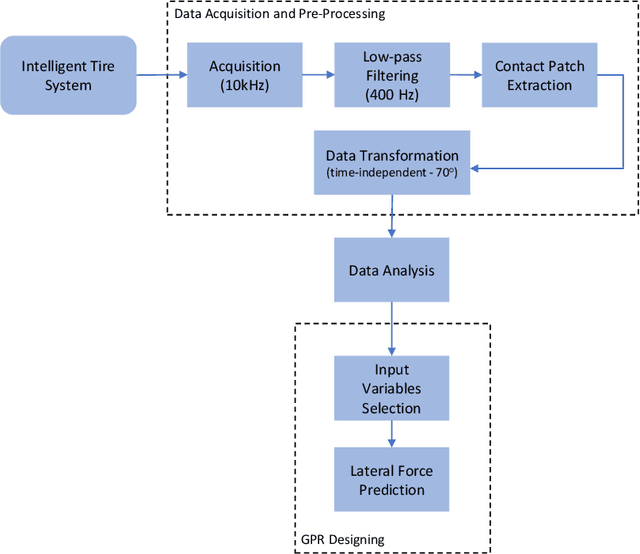


Understanding the dynamic behavior of tires and their interactions with road plays an important role in designing integrated vehicle control strategies. Accordingly, having access to reliable information about the tire-road interactions through tire embedded sensors is very demanding for developing enhanced vehicle control systems. Thus, the main objectives of the present research work are i. to analyze data from an experimental accelerometer-based intelligent tire acquired over a wide range of maneuvers, with different vertical loads, velocities, and high slip angles; and ii. to develop a lateral force predictor based on a machine learning tool, more specifically the Gaussian Process Regression (GPR) technique. It is delineated that the proposed intelligent tire system can provide reliable information about the tire-road interactions even in the case of high slip angles. Besides, the lateral forces model based on GPR can predict forces with acceptable accuracy and provide level of uncertainties that can be very useful for designing vehicle control strategies.