 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Beamforming with Distributed MIMO
Jan 29, 2025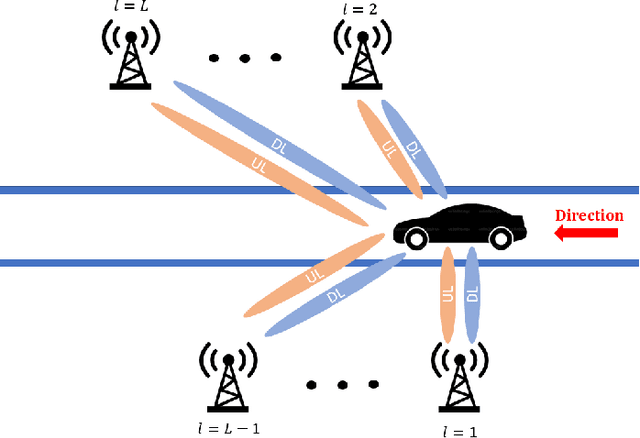
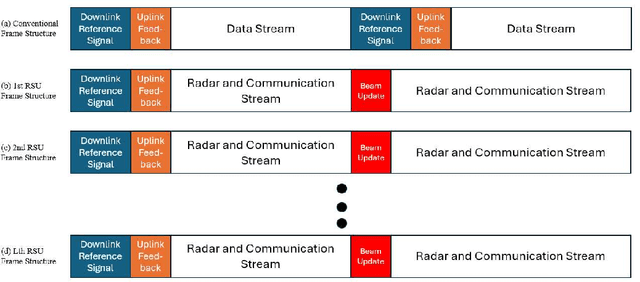
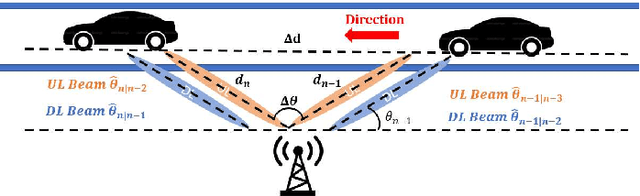
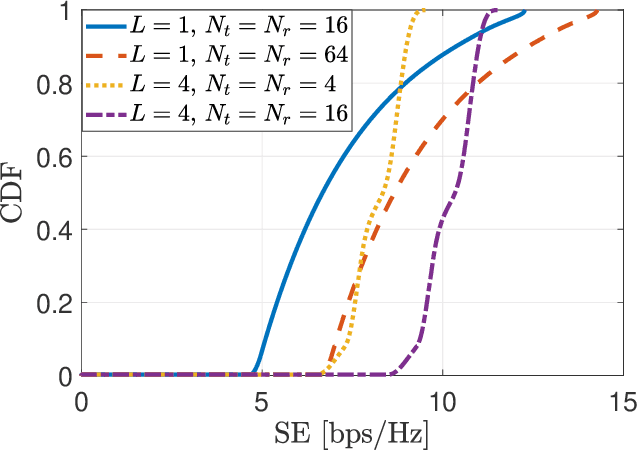
In vehicle-to-everything (V2X) applications, roadside units (RSUs) can be tasked with both sensing and communication functions to enable sensing-assisted communications. Recent studies have demonstrated that distance, angle, and velocity information obtained through sensing can be leveraged to reduce the overhead associated with communication beam tracking. In this work, we extend this concept to scenarios involving multiple distributed RSUs and distributed MIMO (multiple-input multiple-output) systems. We derive the state evolution model, formulate the extended Kalman-filter equations, and implement predictive beamforming for distributed MIMO. Simulation results indicate that, when compared with a co-located massive MIMO antenna array, distributed antennas lead to more uniform and robust sensing performance, coverage, and data rates, while the vehicular user is in motion.