 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Self-Attention for Visual Intersection Classification
Mar 26, 2022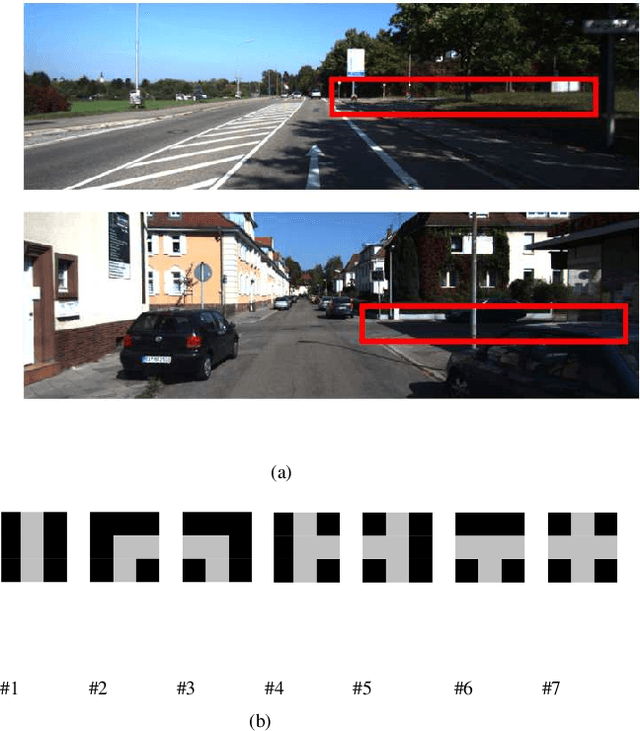
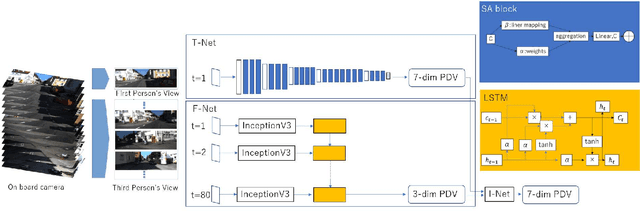

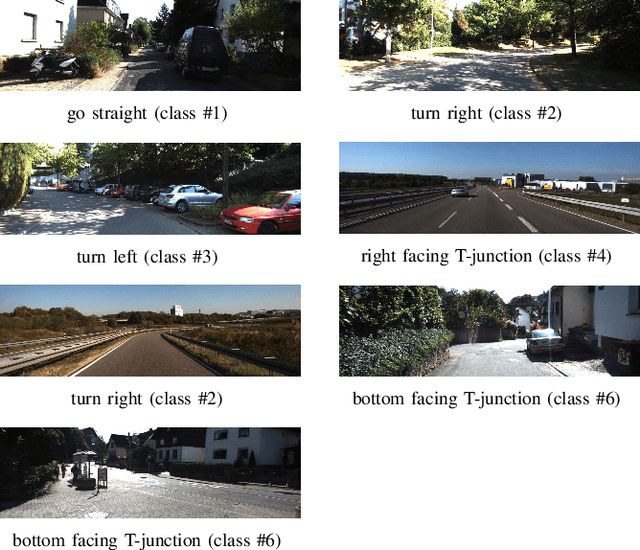
In robot vision, self-attention has recently emerged as a technique for capturing non-local contexts. In this study, we introduced a self-attention mechanism into the intersection recognition system as a method to capture the non-local contexts behind the scenes. An intersection classification system comprises two distinctive modules: (a) a first-person vision (FPV) module, which uses a short egocentric view sequence as the intersection is passed, and (b) a third-person vision (TPV) module, which uses a single view immediately before entering the intersection. The self-attention mechanism is effective in the TPV module because most parts of the local pattern (e.g., road edges, buildings, and sky) are similar to each other, and thus the use of a non-local context (e.g., the angle between two diagonal corners around an intersection) would be effective. This study makes three major contributions. First, we proposed a self-attention-based approach for intersection classification using TPVs. Second, we presented a practical system in which a self-attention-based TPV module is combined with an FPV module to improve the overall recognition performance. Finally, experiments using the public KITTI dataset show that the above self-attention-based system outperforms conventional recognition based on local patterns and recognition based on convolution operations.