 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibrated Model-Based Deep Reinforcement Learning
Jun 19, 2019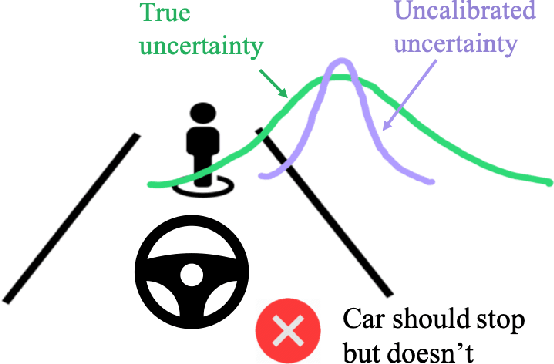
Estimates of predictive uncertainty are important for accurate model-based planning and reinforcement learning. However, predictive uncertainties---especially ones derived from modern deep learning systems---can be inaccurate and impose a bottleneck on performance. This paper explores which uncertainties are needed for model-based reinforcement learning and argues that good uncertainties must be calibrated, i.e. their probabilities should match empirical frequencies of predicted events. We describe a simple way to augment any model-based reinforcement learning agent with a calibrated model and show that doing so consistently improves planning, sample complexity, and exploration. On the \textsc{HalfCheetah} MuJoCo task, our system achieves state-of-the-art performance using 50\% fewer samples than the current leading approach. Our findings suggest that calibration can improve the performance of model-based reinforcement learning with minimal computational and implementation overhead.