 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-iterative Optimization of Trajectory and Radio Resource for Aerial Network
May 02, 2024We address a joint trajectory planning, user association, resource allocation, and power control problem to maximize proportional fairness in the aerial IoT network, considering practical end-to-end quality-of-service (QoS) and communication schedules. Though the problem is rather ancient, apart from the fact that the previous approaches have never considered user- and time-specific QoS, we point out a prevalent mistake in coordinate optimization approaches adopted by the majority of the literature. Coordinate optimization approaches, which repetitively optimize radio resources for a fixed trajectory and vice versa, generally converge to local optima when all variables are differentiable. However, these methods often stagnate at a non-stationary point, significantly degrading the network utility in mixed-integer problems such as joint trajectory and radio resource optimization. We detour this problem by converting the formulated problem into the Markov decision process (MDP). Exploiting the beneficial characteristics of the MDP, we design a non-iterative framework that cooperatively optimizes trajectory and radio resources without initial trajectory choice. The proposed framework can incorporate various trajectory planning algorithms such as the genetic algorithm, tree search, and reinforcement learning. Extensive comparisons with diverse baselines verify that the proposed framework significantly outperforms the state-of-the-art method, nearly achieving the global optimum. Our implementation code is available at https://github.com/hslyu/dbspf.
Solar Coronal Magnetic Field Extrapolation from Synchronic Data with AI-generated Farside
Nov 01, 2020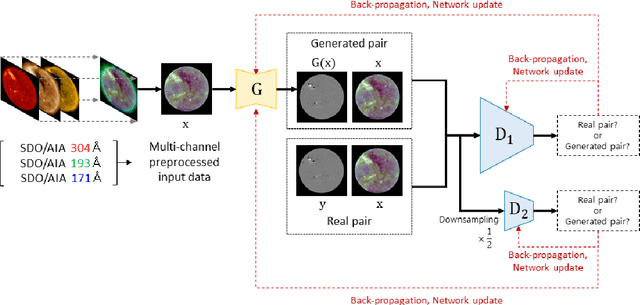
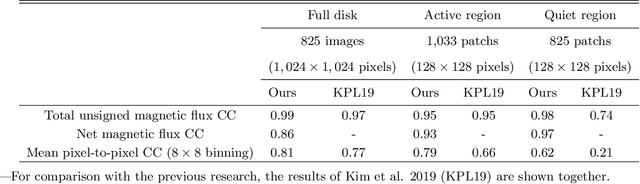
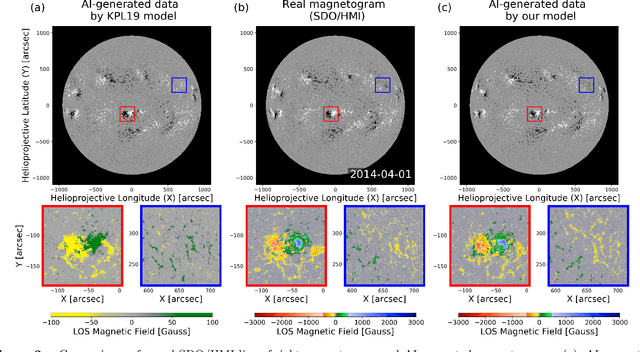
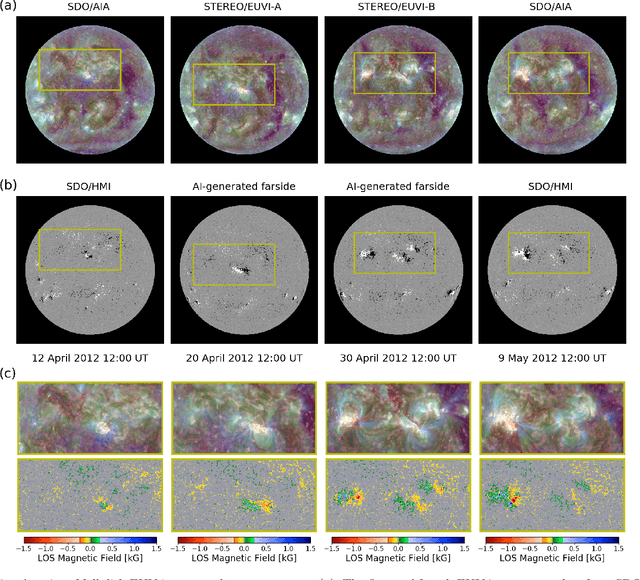
Solar magnetic fields play a key role in understanding the nature of the coronal phenomena. Global coronal magnetic fields are usually extrapolated from photospheric fields, for which farside data is taken when it was at the frontside, about two weeks earlier. For the first time we have constructed the extrapolations of global magnetic fields using frontside and artificial intelligence (AI)-generated farside magnetic fields at a near-real time basis. We generate the farside magnetograms from three channel farside observations of Solar Terrestrial Relations Observatory (STEREO) Ahead (A) and Behind (B) by our deep learning model trained with frontside Solar Dynamics Observatory extreme ultraviolet images and magnetograms. For frontside testing data sets, we demonstrate that the generated magnetic field distributions are consistent with the real ones; not only active regions (ARs), but also quiet regions of the Sun. We make global magnetic field synchronic maps in which conventional farside data are replaced by farside ones generated by our model. The synchronic maps show much better not only the appearance of ARs but also the disappearance of others on the solar surface than before. We use these synchronized magnetic data to extrapolate the global coronal fields using Potential Field Source Surface (PFSS) model. We show that our results are much more consistent with coronal observations than those of the conventional method in view of solar active regions and coronal holes. We present several positive prospects of our new methodology for the study of solar corona, heliosphere, and space weather.
Privacy-Protection Drone Patrol System based on Face Anonymization
May 29, 2020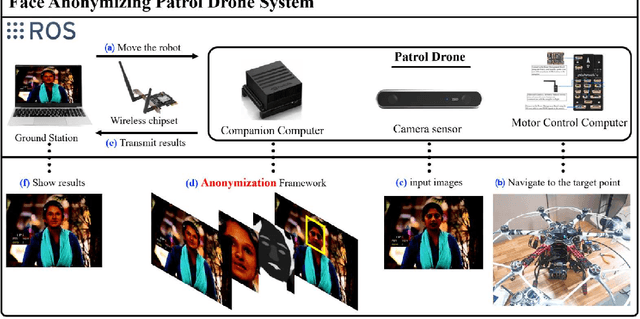
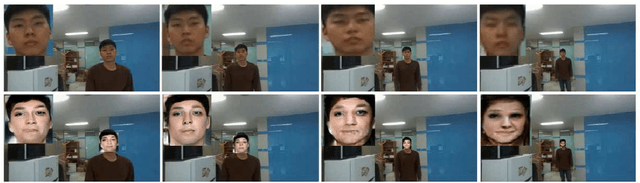
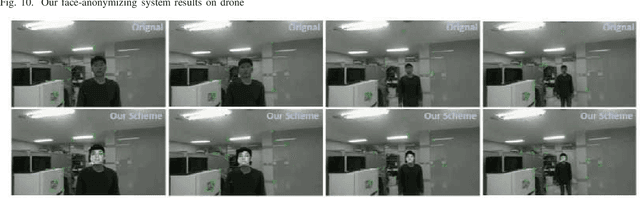

The robot market has been growing significantly and is expected to become 1.5 times larger in 2024 than what it was in 2019. Robots have attracted attention of security companies thanks to their mobility. These days, for security robots, unmanned aerial vehicles (UAVs) have quickly emerged by highlighting their advantage: they can even go to any hazardous place that humans cannot access. For UAVs, Drone has been a representative model and has several merits to consist of various sensors such as high-resolution cameras. Therefore, Drone is the most suitable as a mobile surveillance robot. These attractive advantages such as high-resolution cameras and mobility can be a double-edged sword, i.e., privacy infringement. Surveillance drones take videos with high-resolution to fulfill their role, however, those contain a lot of privacy sensitive information. The indiscriminate shooting is a critical issue for those who are very reluctant to be exposed. To tackle the privacy infringement, this work proposes face-anonymizing drone patrol system. In this system, one person's face in a video is transformed into a different face with facial components maintained. To construct our privacy-preserving system, we have adopted the latest generative adversarial networks frameworks and have some modifications on losses of those frameworks. Our face-anonymzing approach is evaluated with various public face-image and video dataset. Moreover, our system is evaluated with a customized drone consisting of a high-resolution camera, a companion computer, and a drone control computer. Finally, we confirm that our system can protect privacy sensitive information with our face-anonymzing algorithm while preserving the performance of robot perception, i.e., simultaneous localization and mapping.