 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalytical Lyapunov Function Discovery: An RL-based Generative Approach
Feb 04, 2025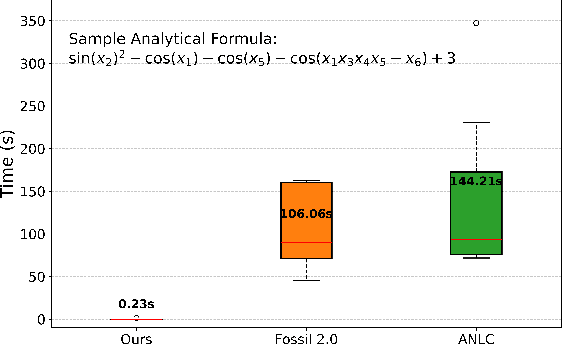
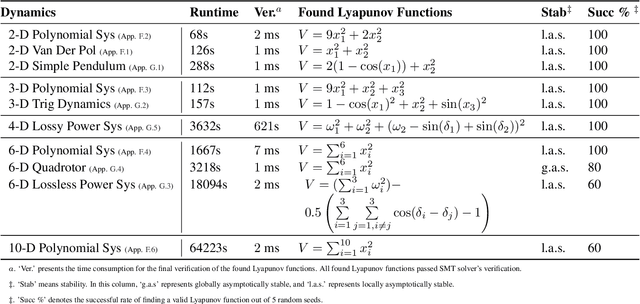
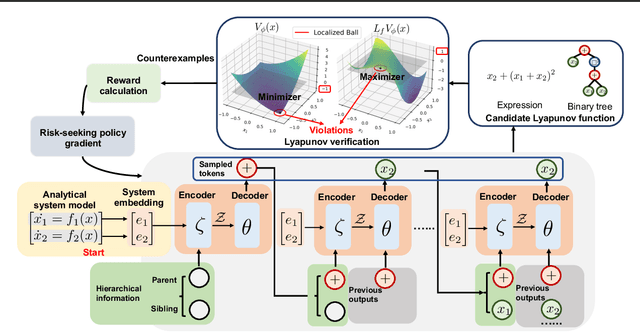

Despite advances in learning-based methods, finding valid Lyapunov functions for nonlinear dynamical systems remains challenging. Current neural network approaches face two main issues: challenges in scalable verification and limited interpretability. To address these, we propose an end-to-end framework using transformers to construct analytical Lyapunov functions (local), which simplifies formal verification, enhances interpretability, and provides valuable insights for control engineers. Our framework consists of a transformer-based trainer that generates candidate Lyapunov functions and a falsifier that verifies candidate expressions and refines the model via risk-seeking policy gradient. Unlike Alfarano et al. (2024), which utilizes pre-training and seeks global Lyapunov functions for low-dimensional systems, our model is trained from scratch via reinforcement learning (RL) and succeeds in finding local Lyapunov functions for high-dimensional and non-polynomial systems. Given the analytical nature of the candidates, we employ efficient optimization methods for falsification during training and formal verification tools for the final verification. We demonstrate the efficiency of our approach on a range of nonlinear dynamical systems with up to ten dimensions and show that it can discover Lyapunov functions not previously identified in the control literature.
Combining Neural Networks and Symbolic Regression for Analytical Lyapunov Function Discovery
Jun 21, 2024



We propose CoNSAL (Combining Neural networks and Symbolic regression for Analytical Lyapunov function) to construct analytical Lyapunov functions for nonlinear dynamic systems. This framework contains a neural Lyapunov function and a symbolic regression component, where symbolic regression is applied to distill the neural network to precise analytical forms. Our approach utilizes symbolic regression not only as a tool for translation but also as a means to uncover counterexamples. This procedure terminates when no counterexamples are found in the analytical formulation. Compared with previous results, our algorithm directly produces an analytical form of the Lyapunov function with improved interpretability in both the learning process and the final results. We apply our algorithm to 2-D inverted pendulum, path following, Van Der Pol Oscillator, 3-D trig dynamics, 4-D rotating wheel pendulum, 6-D 3-bus power system, and demonstrate that our algorithm successfully finds their valid Lyapunov functions.