 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBroadband Ground Motion Synthesis by Diffusion Model with Minimal Condition
Dec 23, 2024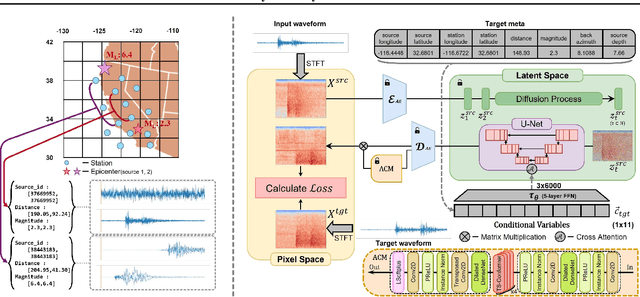
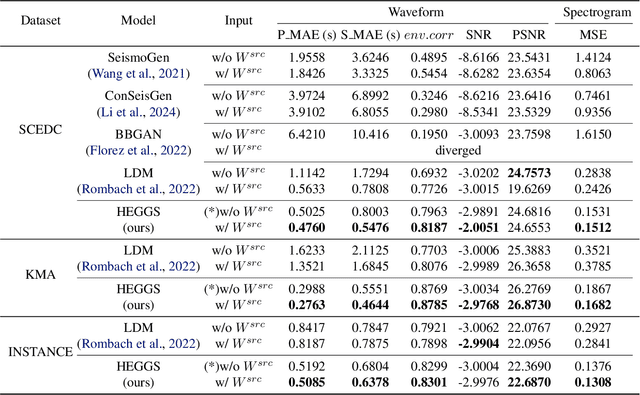
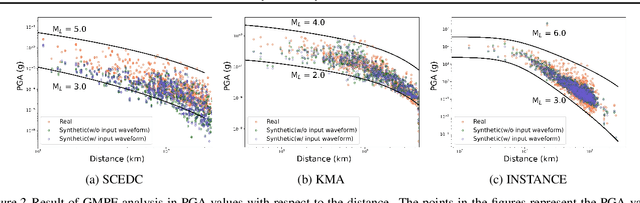
Earthquakes are rare. Hence there is a fundamental call for reliable methods to generate realistic ground motion data for data-driven approaches in seismology. Recent GAN-based methods fall short of the call, as the methods either require special information such as geological traits or generate subpar waveforms that fail to satisfy seismological constraints such as phase arrival times. We propose a specialized Latent Diffusion Model (LDM) that reliably generates realistic waveforms after learning from real earthquake data with minimal conditions: location and magnitude. We also design a domain-specific training method that exploits the traits of earthquake dataset: multiple observed waveforms time-aligned and paired to each earthquake source that are tagged with seismological metadata comprised of earthquake magnitude, depth of focus, and the locations of epicenter and seismometers. We construct the time-aligned earthquake dataset using Southern California Earthquake Data Center (SCEDC) API, and train our model with the dataset and our proposed training method for performance evaluation. Our model surpasses all comparable data-driven methods in various test criteria not only from waveform generation domain but also from seismology such as phase arrival time, GMPE analysis, and spectrum analysis. Our result opens new future research directions for deep learning applications in seismology.
3D Trajectory Reconstruction of Drones using a Single Camera
Sep 06, 2023Drones have been widely utilized in various fields, but the number of drones being used illegally and for hazardous purposes has increased recently. To prevent those illegal drones, in this work, we propose a novel framework for reconstructing 3D trajectories of drones using a single camera. By leveraging calibrated cameras, we exploit the relationship between 2D and 3D spaces. We automatically track the drones in 2D images using the drone tracker and estimate their 2D rotations. By combining the estimated 2D drone positions with their actual length information and camera parameters, we geometrically infer the 3D trajectories of the drones. To address the lack of public drone datasets, we also create synthetic 2D and 3D drone datasets. The experimental results show that the proposed methods accurately reconstruct drone trajectories in 3D space, and demonstrate the potential of our framework for single camera-based surveillance systems.