 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOPEB: Open Physical Environment Benchmark for Artificial Intelligence
Jul 04, 2017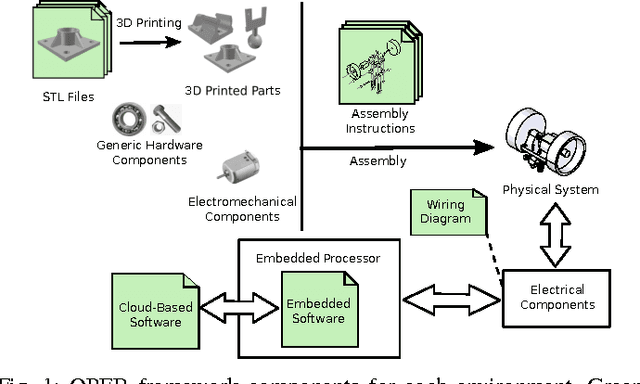
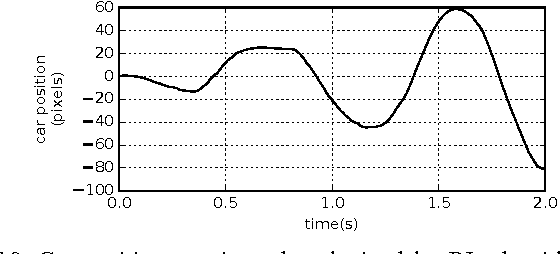
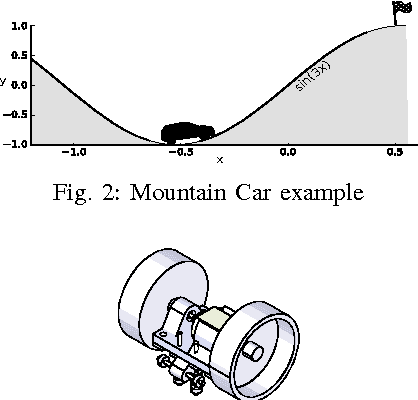
Artificial Intelligence methods to solve continuous- control tasks have made significant progress in recent years. However, these algorithms have important limitations and still need significant improvement to be used in industry and real- world applications. This means that this area is still in an active research phase. To involve a large number of research groups, standard benchmarks are needed to evaluate and compare proposed algorithms. In this paper, we propose a physical environment benchmark framework to facilitate collaborative research in this area by enabling different research groups to integrate their designed benchmarks in a unified cloud-based repository and also share their actual implemented benchmarks via the cloud. We demonstrate the proposed framework using an actual implementation of the classical mountain-car example and present the results obtained using a Reinforcement Learning algorithm.
Fine-grained acceleration control for autonomous intersection management using deep reinforcement learning
May 30, 2017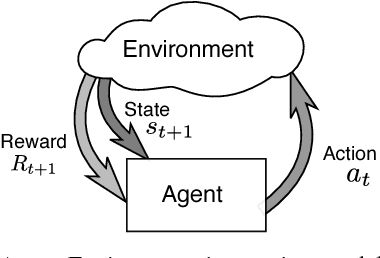
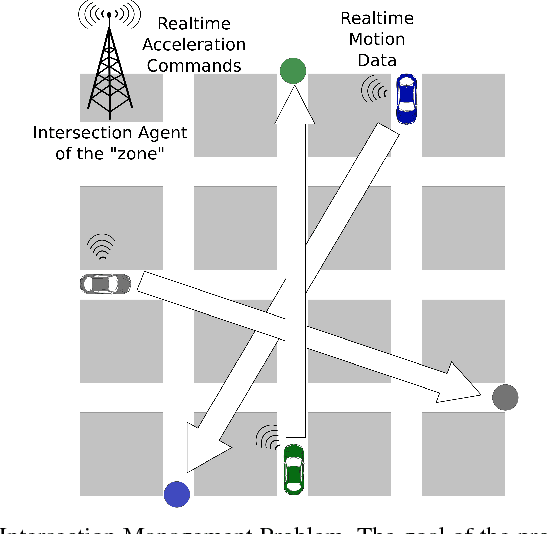
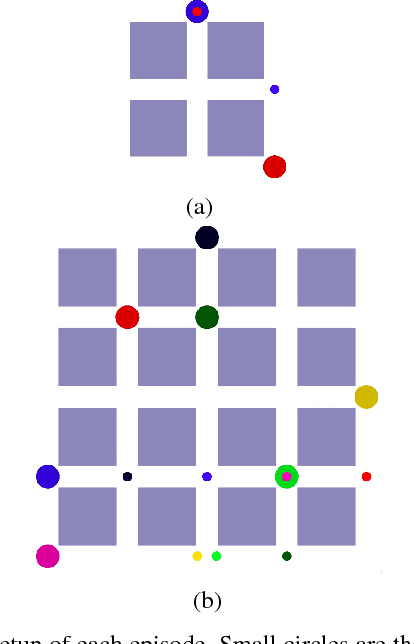
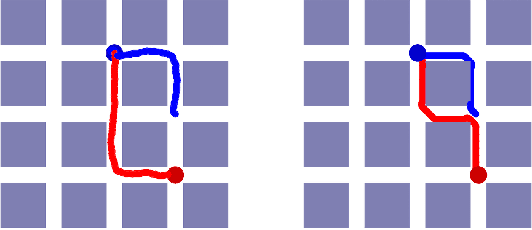
Recent advances in combining deep learning and Reinforcement Learning have shown a promising path for designing new control agents that can learn optimal policies for challenging control tasks. These new methods address the main limitations of conventional Reinforcement Learning methods such as customized feature engineering and small action/state space dimension requirements. In this paper, we leverage one of the state-of-the-art Reinforcement Learning methods, known as Trust Region Policy Optimization, to tackle intersection management for autonomous vehicles. We show that using this method, we can perform fine-grained acceleration control of autonomous vehicles in a grid street plan to achieve a global design objective.