Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-grained acceleration control for autonomous intersection management using deep reinforcement learning
Paper and Code
May 30, 2017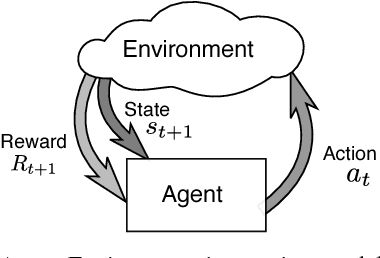
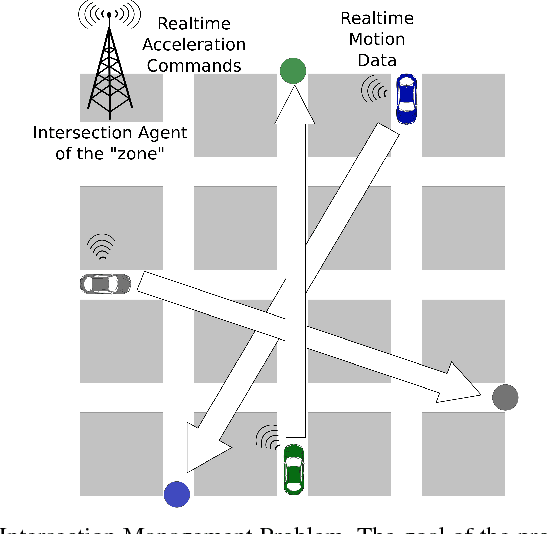
Recent advances in combining deep learning and Reinforcement Learning have shown a promising path for designing new control agents that can learn optimal policies for challenging control tasks. These new methods address the main limitations of conventional Reinforcement Learning methods such as customized feature engineering and small action/state space dimension requirements. In this paper, we leverage one of the state-of-the-art Reinforcement Learning methods, known as Trust Region Policy Optimization, to tackle intersection management for autonomous vehicles. We show that using this method, we can perform fine-grained acceleration control of autonomous vehicles in a grid street plan to achieve a global design objective.
* Accepted in IEEE Smart World Congress 2017
View paper on