 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGLane3D : Detecting Lanes with Graph of 3D Keypoints
Mar 31, 2025Accurate and efficient lane detection in 3D space is essential for autonomous driving systems, where robust generalization is the foremost requirement for 3D lane detection algorithms. Considering the extensive variation in lane structures worldwide, achieving high generalization capacity is particularly challenging, as algorithms must accurately identify a wide variety of lane patterns worldwide. Traditional top-down approaches rely heavily on learning lane characteristics from training datasets, often struggling with lanes exhibiting previously unseen attributes. To address this generalization limitation, we propose a method that detects keypoints of lanes and subsequently predicts sequential connections between them to construct complete 3D lanes. Each key point is essential for maintaining lane continuity, and we predict multiple proposals per keypoint by allowing adjacent grids to predict the same keypoint using an offset mechanism. PointNMS is employed to eliminate overlapping proposal keypoints, reducing redundancy in the estimated BEV graph and minimizing computational overhead from connection estimations. Our model surpasses previous state-of-the-art methods on both the Apollo and OpenLane datasets, demonstrating superior F1 scores and a strong generalization capacity when models trained on OpenLane are evaluated on the Apollo dataset, compared to prior approaches.
ADNet: Temporal Anomaly Detection in Surveillance Videos
Apr 14, 2021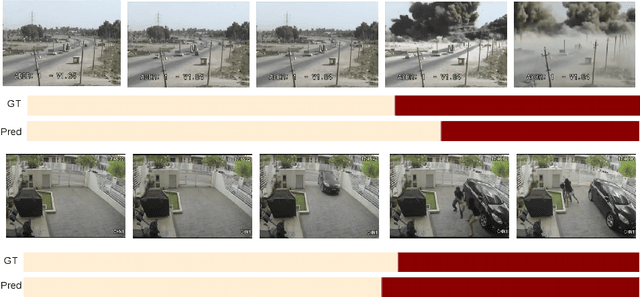
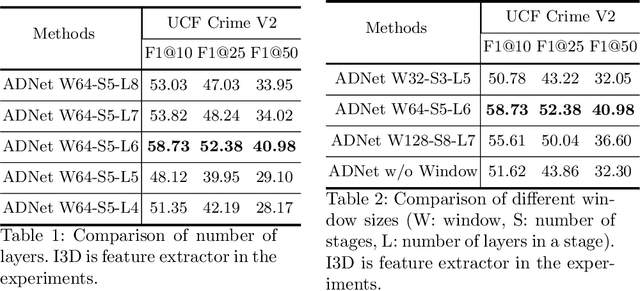
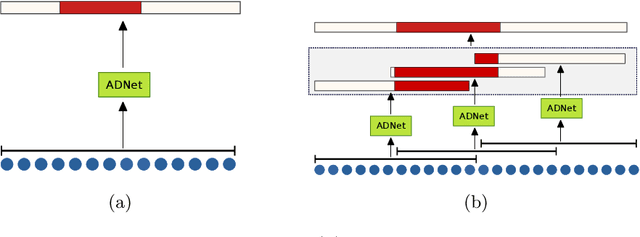
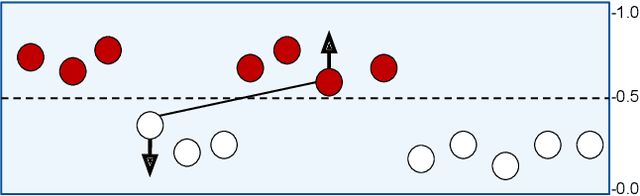
Anomaly detection in surveillance videos is an important research problem in computer vision. In this paper, we propose ADNet, an anomaly detection network, which utilizes temporal convolutions to localize anomalies in videos. The model works online by accepting consecutive windows consisting of fixed-number of video clips. Features extracted from video clips in a window are fed to ADNet, which allows to localize anomalies in videos effectively. We propose the AD Loss function to improve abnormal segment detection performance of ADNet. Additionally, we propose to use F1@k metric for temporal anomaly detection. F1@k is a better evaluation metric than AUC in terms of not penalizing minor shifts in temporal segments and punishing short false positive temporal segment predictions. Furthermore, we extend UCF Crime dataset by adding two more anomaly classes and providing temporal anomaly annotations for all classes. Finally, we thoroughly evaluate our model on the extended UCF Crime dataset. ADNet produces promising results with respect to F1@k metric. Dataset extensions and code will be publicly available upon publishing