 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCentral Angle Optimization for 360-degree Holographic 3D Content
Nov 10, 2023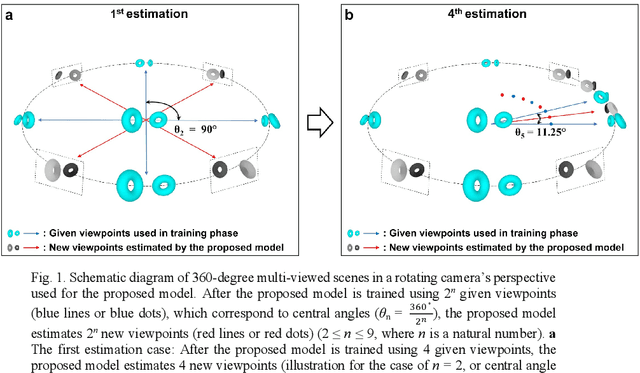
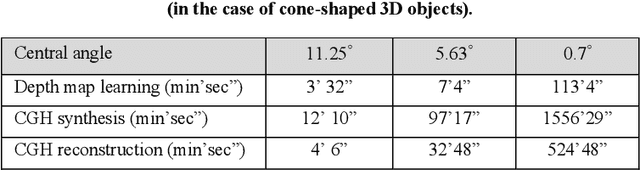
In this study, we propose a method to find an optimal central angle in deep learning-based depth map estimation used to produce realistic holographic content. The acquisition of RGB-depth map images as detailed as possible must be performed to generate holograms of high quality, despite the high computational cost. Therefore, we introduce a novel pipeline designed to analyze various values of central angles between adjacent camera viewpoints equidistant from the origin of an object-centered environment. Then we propose the optimal central angle to generate high-quality holographic content. The proposed pipeline comprises key steps such as comparing estimated depth maps and comparing reconstructed CGHs (Computer-Generated Holograms) from RGB images and estimated depth maps. We experimentally demonstrate and discuss the relationship between the central angle and the quality of digital holographic content.
A novel approach for holographic 3D content generation without depth map
Sep 26, 2023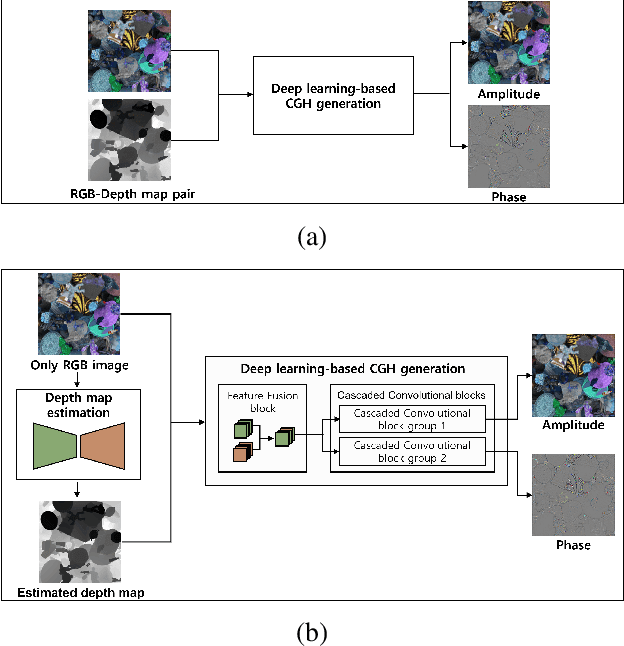

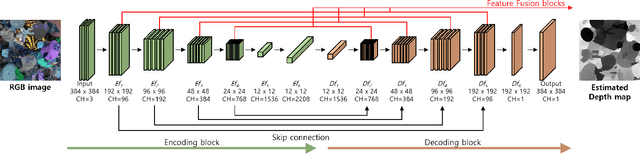
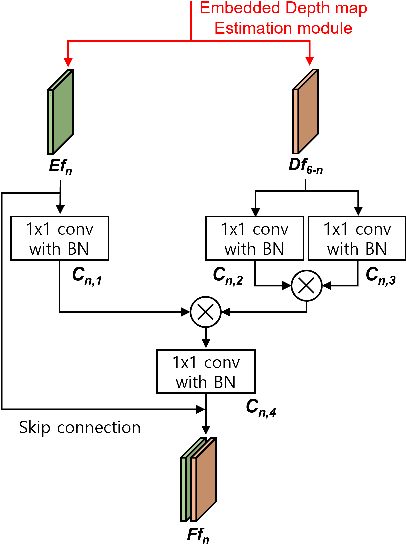
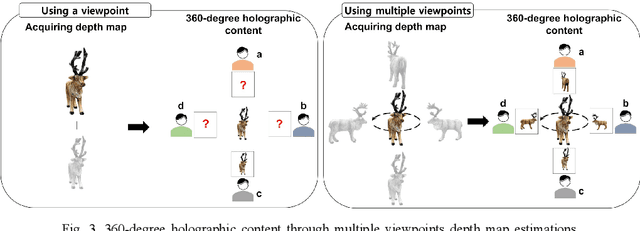
In preparation for observing holographic 3D content, acquiring a set of RGB color and depth map images per scene is necessary to generate computer-generated holograms (CGHs) when using the fast Fourier transform (FFT) algorithm. However, in real-world situations, these paired formats of RGB color and depth map images are not always fully available. We propose a deep learning-based method to synthesize the volumetric digital holograms using only the given RGB image, so that we can overcome environments where RGB color and depth map images are partially provided. The proposed method uses only the input of RGB image to estimate its depth map and then generate its CGH sequentially. Through experiments, we demonstrate that the volumetric hologram generated through our proposed model is more accurate than that of competitive models, under the situation that only RGB color data can be provided.
Deep Learning-based High-precision Depth Map Estimation from Missing Viewpoints for 360 Degree Digital Holography
Mar 09, 2021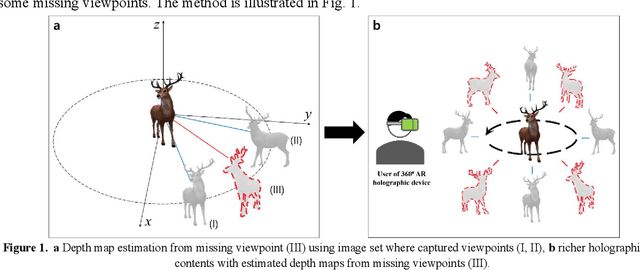
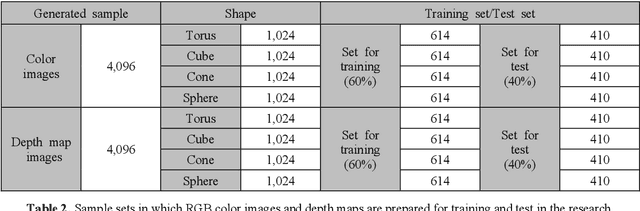
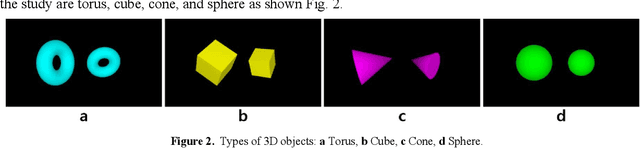
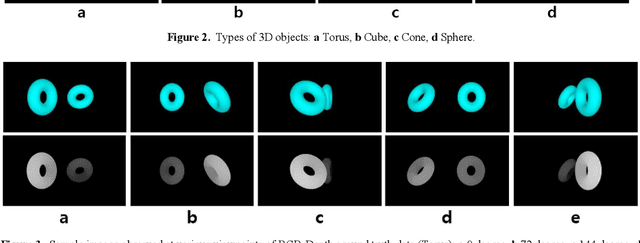
In this paper, we propose a novel, convolutional neural network model to extract highly precise depth maps from missing viewpoints, especially well applicable to generate holographic 3D contents. The depth map is an essential element for phase extraction which is required for synthesis of computer-generated hologram (CGH). The proposed model called the HDD Net uses MSE for the better performance of depth map estimation as loss function, and utilizes the bilinear interpolation in up sampling layer with the Relu as activation function. We design and prepare a total of 8,192 multi-view images, each resolution of 640 by 360 for the deep learning study. The proposed model estimates depth maps through extracting features, up sampling. For quantitative assessment, we compare the estimated depth maps with the ground truths by using the PSNR, ACC, and RMSE. We also compare the CGH patterns made from estimated depth maps with ones made from ground truths. Furthermore, we demonstrate the experimental results to test the quality of estimated depth maps through directly reconstructing holographic 3D image scenes from the CGHs.