 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrity Monitoring of 3D Object Detection in Automated Driving Systems using Raw Activation Patterns and Spatial Filtering
May 13, 2024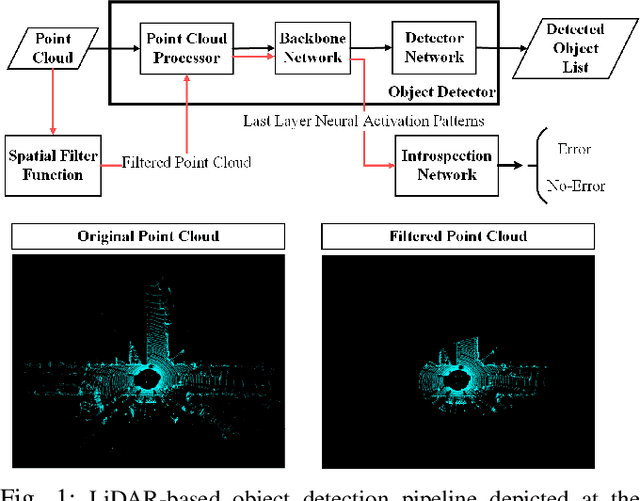

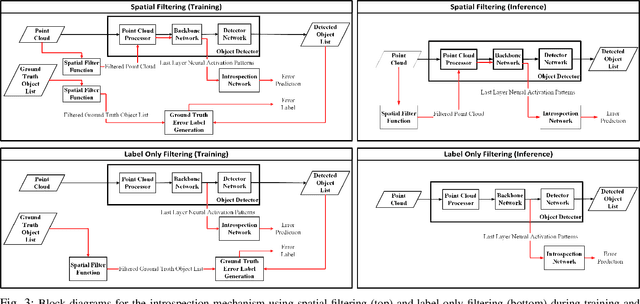
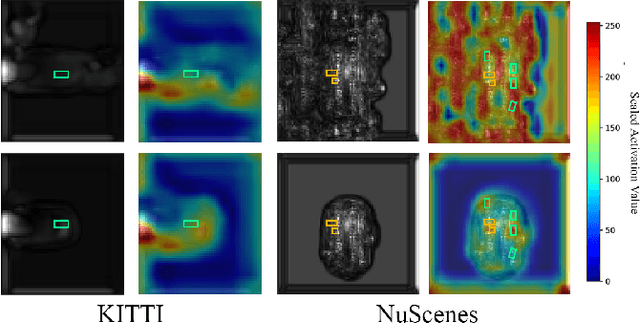
The deep neural network (DNN) models are widely used for object detection in automated driving systems (ADS). Yet, such models are prone to errors which can have serious safety implications. Introspection and self-assessment models that aim to detect such errors are therefore of paramount importance for the safe deployment of ADS. Current research on this topic has focused on techniques to monitor the integrity of the perception mechanism in ADS. Existing introspection models in the literature, however, largely concentrate on detecting perception errors by assigning equal importance to all parts of the input data frame to the perception module. This generic approach overlooks the varying safety significance of different objects within a scene, which obscures the recognition of safety-critical errors, posing challenges in assessing the reliability of perception in specific, crucial instances. Motivated by this shortcoming of state of the art, this paper proposes a novel method integrating raw activation patterns of the underlying DNNs, employed by the perception module, analysis with spatial filtering techniques. This novel approach enhances the accuracy of runtime introspection of the DNN-based 3D object detections by selectively focusing on an area of interest in the data, thereby contributing to the safety and efficacy of ADS perception self-assessment processes.
Run-time Monitoring of 3D Object Detection in Automated Driving Systems Using Early Layer Neural Activation Patterns
Apr 11, 2024



Monitoring the integrity of object detection for errors within the perception module of automated driving systems (ADS) is paramount for ensuring safety. Despite recent advancements in deep neural network (DNN)-based object detectors, their susceptibility to detection errors, particularly in the less-explored realm of 3D object detection, remains a significant concern. State-of-the-art integrity monitoring (also known as introspection) mechanisms in 2D object detection mainly utilise the activation patterns in the final layer of the DNN-based detector's backbone. However, that may not sufficiently address the complexities and sparsity of data in 3D object detection. To this end, we conduct, in this article, an extensive investigation into the effects of activation patterns extracted from various layers of the backbone network for introspecting the operation of 3D object detectors. Through a comparative analysis using Kitti and NuScenes datasets with PointPillars and CenterPoint detectors, we demonstrate that using earlier layers' activation patterns enhances the error detection performance of the integrity monitoring system, yet increases computational complexity. To address the real-time operation requirements in ADS, we also introduce a novel introspection method that combines activation patterns from multiple layers of the detector's backbone and report its performance.
Run-time Introspection of 2D Object Detection in Automated Driving Systems Using Learning Representations
Mar 02, 2024



Reliable detection of various objects and road users in the surrounding environment is crucial for the safe operation of automated driving systems (ADS). Despite recent progresses in developing highly accurate object detectors based on Deep Neural Networks (DNNs), they still remain prone to detection errors, which can lead to fatal consequences in safety-critical applications such as ADS. An effective remedy to this problem is to equip the system with run-time monitoring, named as introspection in the context of autonomous systems. Motivated by this, we introduce a novel introspection solution, which operates at the frame level for DNN-based 2D object detection and leverages neural network activation patterns. The proposed approach pre-processes the neural activation patterns of the object detector's backbone using several different modes. To provide extensive comparative analysis and fair comparison, we also adapt and implement several state-of-the-art (SOTA) introspection mechanisms for error detection in 2D object detection, using one-stage and two-stage object detectors evaluated on KITTI and BDD datasets. We compare the performance of the proposed solution in terms of error detection, adaptability to dataset shift, and, computational and memory resource requirements. Our performance evaluation shows that the proposed introspection solution outperforms SOTA methods, achieving an absolute reduction in the missed error ratio of 9% to 17% in the BDD dataset.