 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiplayer Games for Learning Multirobot Coordination Algorithms
Apr 20, 2016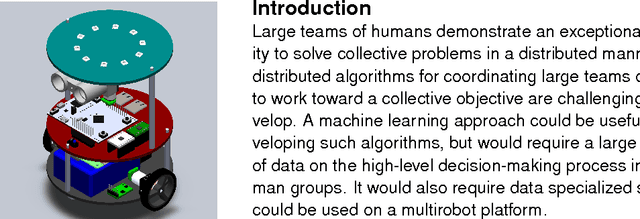
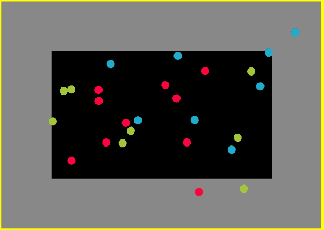
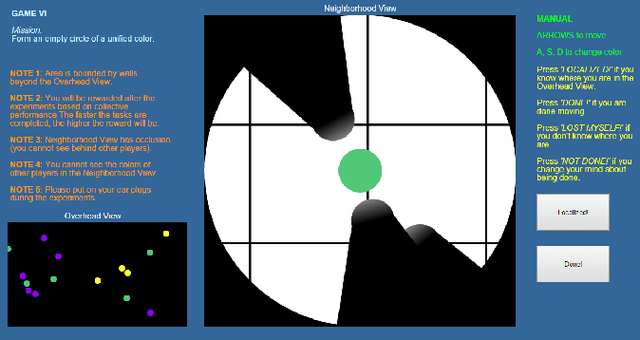
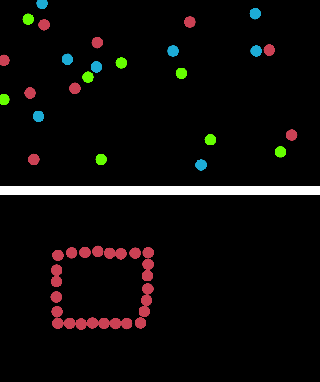
Humans have an impressive ability to solve complex coordination problems in a fully distributed manner. This ability, if learned as a set of distributed multirobot coordination strategies, can enable programming large groups of robots to collaborate towards complex coordination objectives in a way similar to humans. Such strategies would offer robustness, adaptability, fault-tolerance, and, importantly, distributed decision-making. To that end, we have designed a networked gaming platform to investigate human group behavior, specifically in solving complex collaborative coordinated tasks. Through this platform, we are able to limit the communication, sensing, and actuation capabilities provided to the players. With the aim of learning coordination algorithms for robots in mind, we define these capabilities to mimic those of a simple ground robot.