 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManipulation via Force Distribution at Contact
Feb 03, 2026Efficient and robust trajectories play a crucial role in contact-rich manipulation, which demands accurate mod- eling of object-robot interactions. Many existing approaches rely on point contact models due to their computational effi- ciency. Simple contact models are computationally efficient but inherently limited for achieving human-like, contact-rich ma- nipulation, as they fail to capture key frictional dynamics and torque generation observed in human manipulation. This study introduces a Force-Distributed Line Contact (FDLC) model in contact-rich manipulation and compares it against conventional point contact models. A bi-level optimization framework is constructed, in which the lower-level solves an optimization problem for contact force computation, and the upper-level optimization applies iLQR for trajectory optimization. Through this framework, the limitations of point contact are demon- strated, and the benefits of the FDLC in generating efficient and robust trajectories are established. The effectiveness of the proposed approach is validated by a box rotating task, demonstrating that FDLC enables trajectories generated via non-uniform force distributions along the contact line, while requiring lower control effort and less motion of the robot.
Trajectory Optimization for In-Hand Manipulation with Tactile Force Control
Mar 11, 2025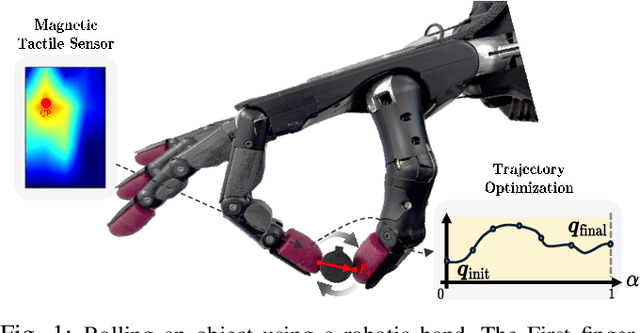
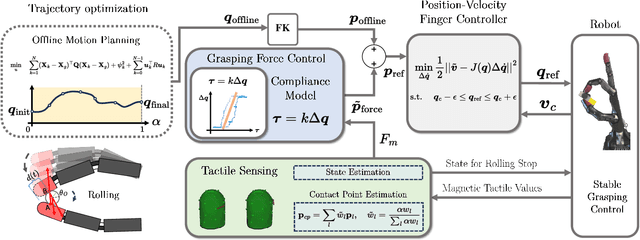
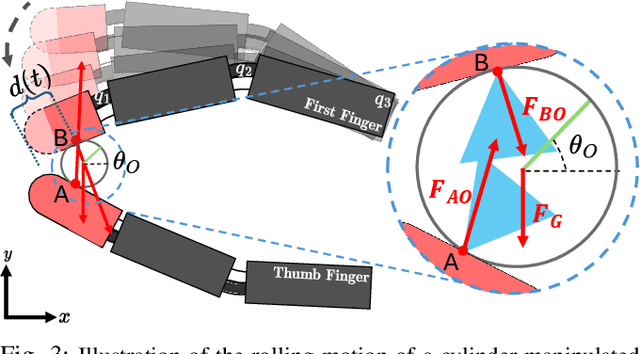
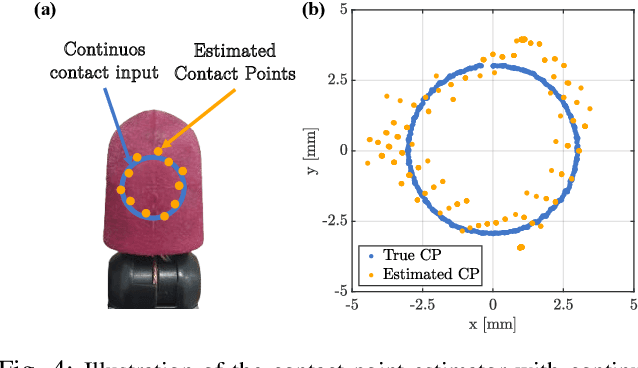
The strength of the human hand lies in its ability to manipulate small objects precisely and robustly. In contrast, simple robotic grippers have low dexterity and fail to handle small objects effectively. This is why many automation tasks remain unsolved by robots. This paper presents an optimization-based framework for in-hand manipulation with a robotic hand equipped with compact Magnetic Tactile Sensors (MTSs). The small form factor of the robotic hand from Shadow Robot introduces challenges in estimating the state of the object while satisfying contact constraints. To address this, we formulate a trajectory optimization problem using Nonlinear Programming (NLP) for finger movements while ensuring contact points to change along the geometry of the fingers. Using the optimized trajectory from the solver, we implement and test an open-loop controller for rolling motion. To further enhance robustness and accuracy, we introduce a force controller for the fingers and a state estimator for the object utilizing MTSs. The proposed framework is validated through comparative experiments, showing that incorporating the force control with compliance consideration improves the accuracy and robustness of the rolling motion. Rolling an object with the force controller is 30\% more likely to succeed than running an open-loop controller. The demonstration video is available at https://youtu.be/6J_muL_AyE8.