 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetropolis-Hastings Sampling for 3D Gaussian Reconstruction
Jun 15, 2025We propose an adaptive sampling framework for 3D Gaussian Splatting (3DGS) that leverages comprehensive multi-view photometric error signals within a unified Metropolis-Hastings approach. Traditional 3DGS methods heavily rely on heuristic-based density-control mechanisms (e.g., cloning, splitting, and pruning), which can lead to redundant computations or the premature removal of beneficial Gaussians. Our framework overcomes these limitations by reformulating densification and pruning as a probabilistic sampling process, dynamically inserting and relocating Gaussians based on aggregated multi-view errors and opacity scores. Guided by Bayesian acceptance tests derived from these error-based importance scores, our method substantially reduces reliance on heuristics, offers greater flexibility, and adaptively infers Gaussian distributions without requiring predefined scene complexity. Experiments on benchmark datasets, including Mip-NeRF360, Tanks and Temples, and Deep Blending, show that our approach reduces the number of Gaussians needed, enhancing computational efficiency while matching or modestly surpassing the view-synthesis quality of state-of-the-art models.
Targetless LiDAR-Camera Calibration with Anchored 3D Gaussians
Apr 06, 2025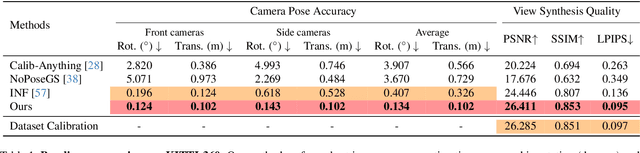
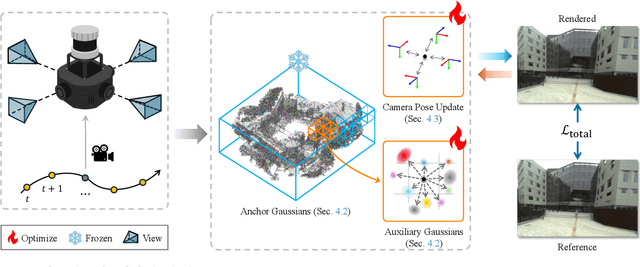

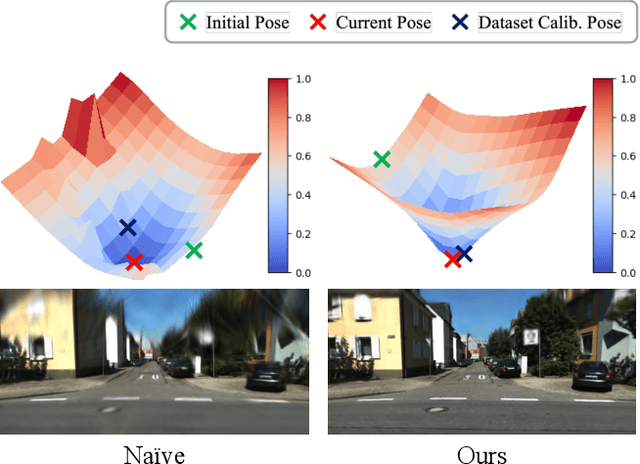
We present a targetless LiDAR-camera calibration method that jointly optimizes sensor poses and scene geometry from arbitrary scenes, without relying on traditional calibration targets such as checkerboards or spherical reflectors. Our approach leverages a 3D Gaussian-based scene representation. We first freeze reliable LiDAR points as anchors, then jointly optimize the poses and auxiliary Gaussian parameters in a fully differentiable manner using a photometric loss. This joint optimization significantly reduces sensor misalignment, resulting in higher rendering quality and consistently improved PSNR compared to the carefully calibrated poses provided in popular datasets. We validate our method through extensive experiments on two real-world autonomous driving datasets, KITTI-360 and Waymo, each featuring distinct sensor configurations. Additionally, we demonstrate the robustness of our approach using a custom LiDAR-camera setup, confirming strong performance across diverse hardware configurations.