 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArc Routing Problems with Multiple Trucks and Drones: A Hybrid Genetic Algorithm
Aug 25, 2025Arc-routing problems underpin numerous critical field operations, including power-line inspection, urban police patrolling, and traffic monitoring. In this domain, the Rural Postman Problem (RPP) is a fundamental variant in which a prescribed subset of edges or arcs in a network must be traversed. This paper investigates a generalized form of the RPP, called RPP-mTD, which involves a fleet of multiple trucks, each carrying multiple drones. The trucks act as mobile depots traversing a road network, from which drones are launched to execute simultaneous service, with the objective of minimizing the overall makespan. Given the combinatorial complexity of RPP-mTD, we propose a Hybrid Genetic Algorithm (HGA) that combines population-based exploration with targeted neighborhood searches. Solutions are encoded using a two-layer chromosome that represents: (i) an ordered, directed sequence of required edges, and (ii) their assignment to vehicles. A tailored segment-preserving crossover operator is introduced, along with multiple local search techniques to intensify the optimization. We benchmark the proposed HGA against established single truck-and-drone instances, demonstrating competitive performance. Additionally, we conduct extensive evaluations on new, larger-scale instances to demonstrate scalability. Our findings highlight the operational benefits of closely integrated truck-drone fleets, affirming the HGA's practical effectiveness as a decision-support tool in advanced mixed-fleet logistics.
Deep Reinforcement Learning for Dynamic Order Picking in Warehouse Operations
Aug 03, 2024



Order picking is a crucial operation in warehouses that significantly impacts overall efficiency and profitability. This study addresses the dynamic order picking problem, a significant concern in modern warehouse management where real-time adaptation to fluctuating order arrivals and efficient picker routing are crucial. Traditional methods, often assuming fixed order sets, fall short in this dynamic environment. We utilize Deep Reinforcement Learning (DRL) as a solution methodology to handle the inherent uncertainties in customer demands. We focus on a single-block warehouse with an autonomous picking device, eliminating human behavioral factors. Our DRL framework enables the dynamic optimization of picker routes, significantly reducing order throughput times, especially under high order arrival rates. Experiments demonstrate a substantial decrease in order throughput time and unfulfilled orders compared to benchmark algorithms. We further investigate integrating a hyperparameter in the reward function that allows for flexible balancing between distance traveled and order completion time. Finally, we demonstrate the robustness of our DRL model for out-of-sample test instances.
Deep Reinforcement Learning for Picker Routing Problem in Warehousing
Feb 05, 2024Order Picker Routing is a critical issue in Warehouse Operations Management. Due to the complexity of the problem and the need for quick solutions, suboptimal algorithms are frequently employed in practice. However, Reinforcement Learning offers an appealing alternative to traditional heuristics, potentially outperforming existing methods in terms of speed and accuracy. We introduce an attention based neural network for modeling picker tours, which is trained using Reinforcement Learning. Our method is evaluated against existing heuristics across a range of problem parameters to demonstrate its efficacy. A key advantage of our proposed method is its ability to offer an option to reduce the perceived complexity of routes.
Learning to Project in Multi-Objective Binary Linear Programming
Jan 30, 2019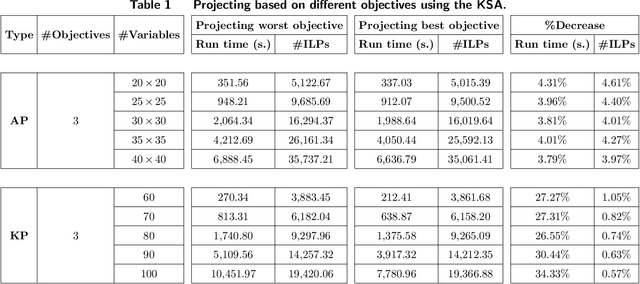
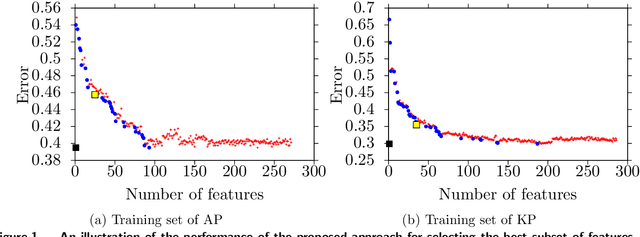
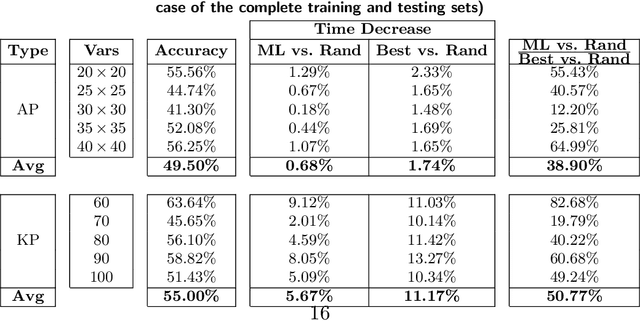
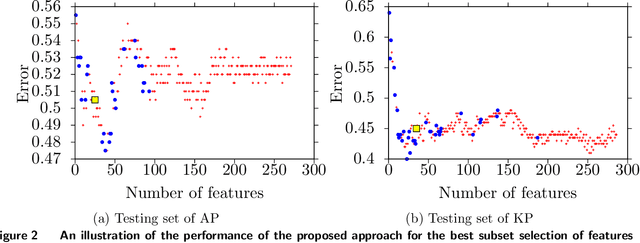
In this paper, we investigate the possibility of improving the performance of multi-objective optimization solution approaches using machine learning techniques. Specifically, we focus on multi-objective binary linear programs and employ one of the most effective and recently developed criterion space search algorithms, the so-called KSA, during our study. This algorithm computes all nondominated points of a problem with p objectives by searching on a projected criterion space, i.e., a (p-1)-dimensional criterion apace. We present an effective and fast learning approach to identify on which projected space the KSA should work. We also present several generic features/variables that can be used in machine learning techniques for identifying the best projected space. Finally, we present an effective bi-objective optimization based heuristic for selecting the best subset of the features to overcome the issue of overfitting in learning. Through an extensive computational study over 2000 instances of tri-objective Knapsack and Assignment problems, we demonstrate that an improvement of up to 12% in time can be achieved by the proposed learning method compared to a random selection of the projected space.