 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNext-Depth Lookahead Tree
Sep 18, 2025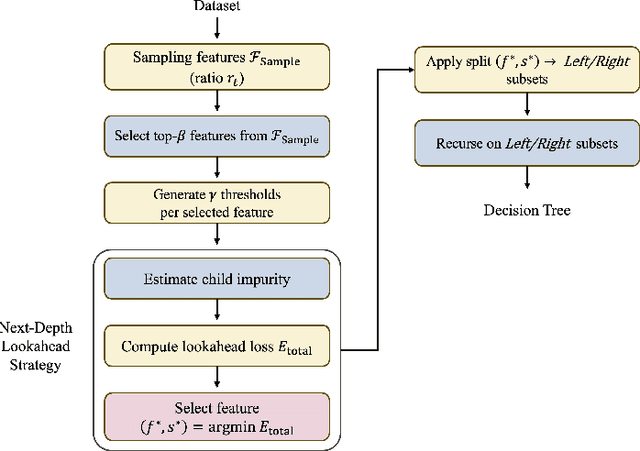
This paper proposes the Next-Depth Lookahead Tree (NDLT), a single-tree model designed to improve performance by evaluating node splits not only at the node being optimized but also by evaluating the quality of the next depth level.
A Predictive Model Based on Transformer with Statistical Feature Embedding in Manufacturing Sensor Dataset
Jul 09, 2024In the manufacturing process, sensor data collected from equipment is crucial for building predictive models to manage processes and improve productivity. However, in the field, it is challenging to gather sufficient data to build robust models. This study proposes a novel predictive model based on the Transformer, utilizing statistical feature embedding and window positional encoding. Statistical features provide an effective representation of sensor data, and the embedding enables the Transformer to learn both time- and sensor-related information. Window positional encoding captures precise time details from the feature embedding. The model's performance is evaluated in two problems: fault detection and virtual metrology, showing superior results compared to baseline models. This improvement is attributed to the efficient use of parameters, which is particularly beneficial for sensor data that often has limited sample sizes. The results support the model's applicability across various manufacturing industries, demonstrating its potential for enhancing process management and yield.
Amplifying the Imitation Effect for Reinforcement Learning of UCAV's Mission Execution
Jan 17, 2019
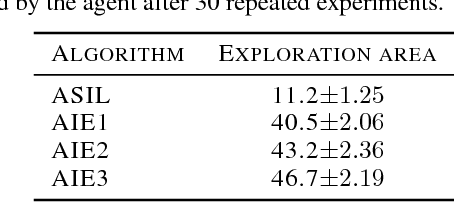
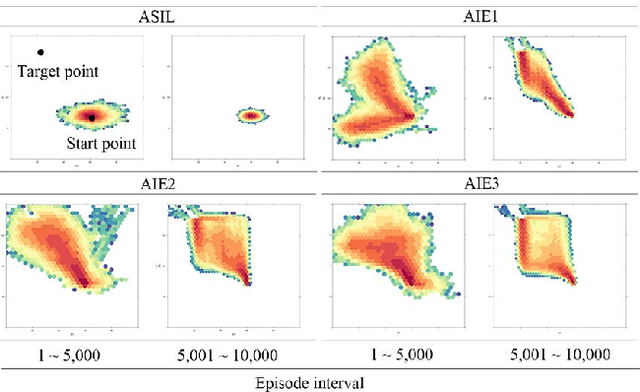
This paper proposes a new reinforcement learning (RL) algorithm that enhances exploration by amplifying the imitation effect (AIE). This algorithm consists of self-imitation learning and random network distillation algorithms. We argue that these two algorithms complement each other and that combining these two algorithms can amplify the imitation effect for exploration. In addition, by adding an intrinsic penalty reward to the state that the RL agent frequently visits and using replay memory for learning the feature state when using an exploration bonus, the proposed approach leads to deep exploration and deviates from the current converged policy. We verified the exploration performance of the algorithm through experiments in a two-dimensional grid environment. In addition, we applied the algorithm to a simulated environment of unmanned combat aerial vehicle (UCAV) mission execution, and the empirical results show that AIE is very effective for finding the UCAV's shortest flight path to avoid an enemy's missiles.