 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHREC: A Spectral Embedding-Based Approach for Ab-Initio Reconstruction of Helical Molecules
Mar 12, 2026Cryo-electron microscopy (cryo-EM) has emerged as a powerful technique for determining the three-dimensional structures of biological molecules at near-atomic resolution. However, reconstructing helical assemblies presents unique challenges due to their inherent symmetry and the need to determine unknown helical symmetry parameters. Traditional approaches require an accurate initial estimation of these parameters, which is often obtained through trial and error or prior knowledge. These requirements can lead to incorrect reconstructions, limiting the reliability of ab initio helical reconstruction. In this work, we present SHREC (Spectral Helical REConstruction), an algorithm that directly recovers the projection angles of helical segments from their two-dimensional cryo-EM images, without requiring prior knowledge of helical symmetry parameters. Our approach leverages the insight that projections of helical segments form a one-dimensional manifold, which can be recovered using spectral embedding techniques. Experimental validation on publicly available datasets demonstrates that SHREC achieves high resolution reconstructions while accurately recovering helical parameters, requiring only knowledge of the specimen's axial symmetry group. By eliminating the need for initial symmetry estimates, SHREC offers a more robust and automated pathway for determining helical structures in cryo-EM.
Vibration-based Full State In-Hand Manipulation of Thin Objects
Dec 19, 2024Robotic hands offer advanced manipulation capabilities, while their complexity and cost often limit their real-world applications. In contrast, simple parallel grippers, though affordable, are restricted to basic tasks like pick-and-place. Recently, a vibration-based mechanism was proposed to augment parallel grippers and enable in-hand manipulation capabilities for thin objects. By utilizing the stick-slip phenomenon, a simple controller was able to drive a grasped object to a desired position. However, due to the underactuated nature of the mechanism, direct control of the object's orientation was not possible. In this letter, we address the challenge of manipulating the entire state of the object. Hence, we present the excitation of a cyclic phenomenon where the object's center-of-mass rotates in a constant radius about the grasping point. With this cyclic motion, we propose an algorithm for manipulating the object to desired states. In addition to a full analytical analysis of the cyclic phenomenon, we propose the use of duty cycle modulation in operating the vibration actuator to provide more accurate manipulation. Finite element analysis, experiments and task demonstrations validate the proposed algorithm.
Unsupervised Frequent Pattern Mining for CEP
Jul 28, 2022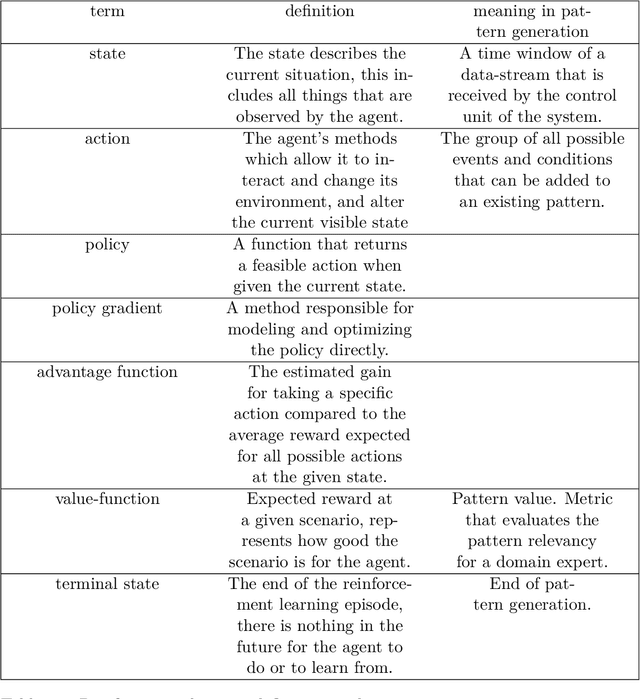
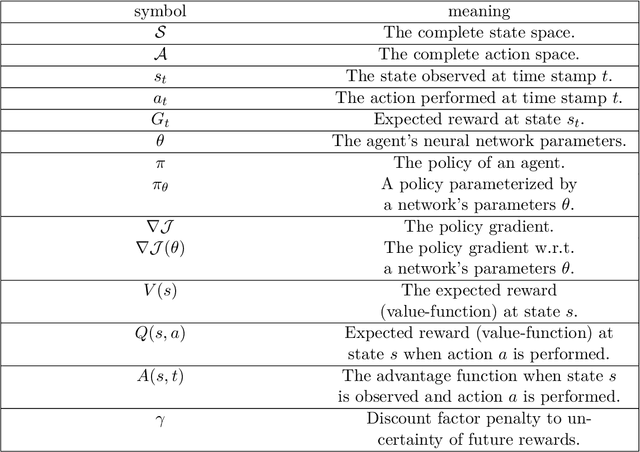
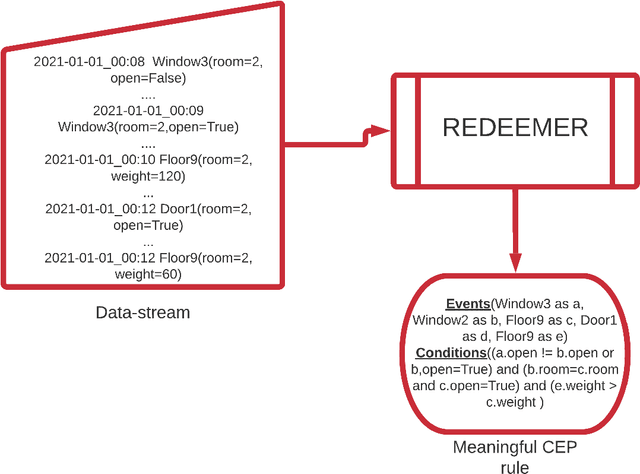
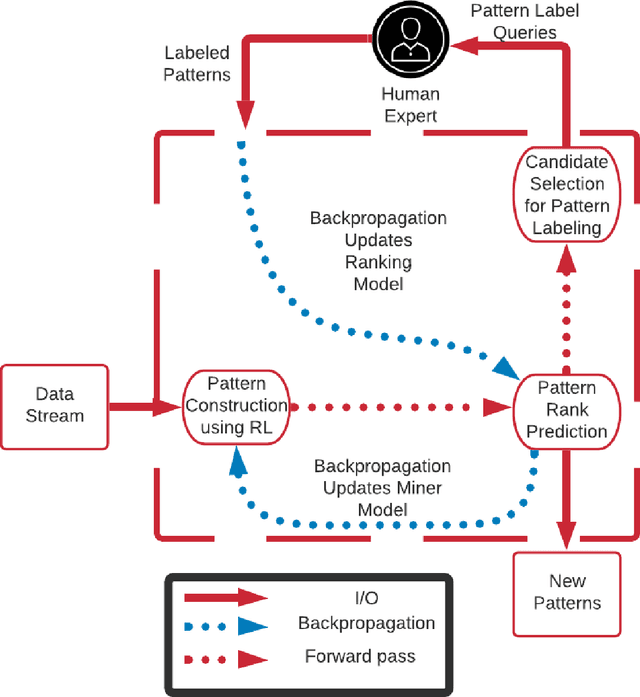
Complex Event Processing (CEP) is a set of methods that allow efficient knowledge extraction from massive data streams using complex and highly descriptive patterns. Numerous applications, such as online finance, healthcare monitoring and fraud detection use CEP technologies to capture critical alerts, potential threats, or vital notifications in real time. As of today, in many fields, patterns are manually defined by human experts. However, desired patterns often contain convoluted relations that are difficult for humans to detect, and human expertise is scarce in many domains. We present REDEEMER (REinforcement baseD cEp pattErn MinER), a novel reinforcement and active learning approach aimed at mining CEP patterns that allow expansion of the knowledge extracted while reducing the human effort required. This approach includes a novel policy gradient method for vast multivariate spaces and a new way to combine reinforcement and active learning for CEP rule learning while minimizing the number of labels needed for training. REDEEMER aims to enable CEP integration in domains that could not utilize it before. To the best of our knowledge, REDEEMER is the first system that suggests new CEP rules that were not observed beforehand, and is the first method aimed for increasing pattern knowledge in fields where experts do not possess sufficient information required for CEP tools. Our experiments on diverse data-sets demonstrate that REDEEMER is able to extend pattern knowledge while outperforming several state-of-the-art reinforcement learning methods for pattern mining.