 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Differential Privacy Against Membership Inference in Federated Learning: Insights from the NIST Genomics Red Team Challenge
Apr 14, 2026While Federated Learning (FL) mitigates direct data exposure, the resulting trained models remain susceptible to membership inference attacks (MIAs). This paper presents an empirical evaluation of Differential Privacy (DP) as a defense mechanism against MIAs in FL, leveraging the environment of the 2025 NIST Genomics Privacy-Preserving Federated Learning (PPFL) Red Teaming Event. To improve inference accuracy, we propose a stacking attack strategy that ensembles seven black-box estimators to train a meta-classifier on prediction probabilities and cross-entropy losses. We evaluate this methodology against target models under three privacy configurations: an unprotected convolutional neural network (CNN, $ε=\infty$), a low-privacy DP model ($ε=200$), and a high-privacy DP model ($ε=10$). The attack outperforms all baselines in the No DP and Low Privacy settings and, critically, maintains measurable membership leakage at $ε=200$ where a single-signal LiRA baseline collapses. Evaluated on an independent third-party benchmark, these results provide an empirical characterisation of how stacking-based inference degrades across calibrated DP tiers in FL.
Anomaly-Flow: A Multi-domain Federated Generative Adversarial Network for Distributed Denial-of-Service Detection
Mar 18, 2025Distributed denial-of-service (DDoS) attacks remain a critical threat to Internet services, causing costly disruptions. While machine learning (ML) has shown promise in DDoS detection, current solutions struggle with multi-domain environments where attacks must be detected across heterogeneous networks and organizational boundaries. This limitation severely impacts the practical deployment of ML-based defenses in real-world settings. This paper introduces Anomaly-Flow, a novel framework that addresses this critical gap by combining Federated Learning (FL) with Generative Adversarial Networks (GANs) for privacy-preserving, multi-domain DDoS detection. Our proposal enables collaborative learning across diverse network domains while preserving data privacy through synthetic flow generation. Through extensive evaluation across three distinct network datasets, Anomaly-Flow achieves an average F1-score of $0.747$, outperforming baseline models. Importantly, our framework enables organizations to share attack detection capabilities without exposing sensitive network data, making it particularly valuable for critical infrastructure and privacy-sensitive sectors. Beyond immediate technical contributions, this work provides insights into the challenges and opportunities in multi-domain DDoS detection, establishing a foundation for future research in collaborative network defense systems. Our findings have important implications for academic research and industry practitioners working to deploy practical ML-based security solutions.
Design and implementation of intelligent packet filtering in IoT microcontroller-based devices
May 30, 2023



Internet of Things (IoT) devices are increasingly pervasive and essential components in enabling new applications and services. However, their widespread use also exposes them to exploitable vulnerabilities and flaws that can lead to significant losses. In this context, ensuring robust cybersecurity measures is essential to protect IoT devices from malicious attacks. However, the current solutions that provide flexible policy specifications and higher security levels for IoT devices are scarce. To address this gap, we introduce T800, a low-resource packet filter that utilizes machine learning (ML) algorithms to classify packets in IoT devices. We present a detailed performance benchmarking framework and demonstrate T800's effectiveness on the ESP32 system-on-chip microcontroller and ESP-IDF framework. Our evaluation shows that T800 is an efficient solution that increases device computational capacity by excluding unsolicited malicious traffic from the processing pipeline. Additionally, T800 is adaptable to different systems and provides a well-documented performance evaluation strategy for security ML-based mechanisms on ESP32-based IoT systems. Our research contributes to improving the cybersecurity of resource-constrained IoT devices and provides a scalable, efficient solution that can be used to enhance the security of IoT systems.
Bridging the gap to real-world for network intrusion detection systems with data-centric approach
Oct 25, 2021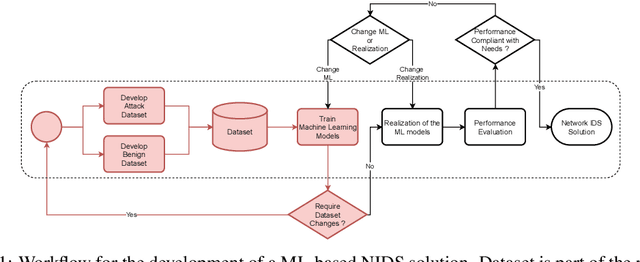
Most research using machine learning (ML) for network intrusion detection systems (NIDS) uses well-established datasets such as KDD-CUP99, NSL-KDD, UNSW-NB15, and CICIDS-2017. In this context, the possibilities of machine learning techniques are explored, aiming for metrics improvements compared to the published baselines (model-centric approach). However, those datasets present some limitations as aging that make it unfeasible to transpose those ML-based solutions to real-world applications. This paper presents a systematic data-centric approach to address the current limitations of NIDS research, specifically the datasets. This approach generates NIDS datasets composed of the most recent network traffic and attacks, with the labeling process integrated by design.
A-star path planning simulation for UAS Traffic Management application
Jul 27, 2021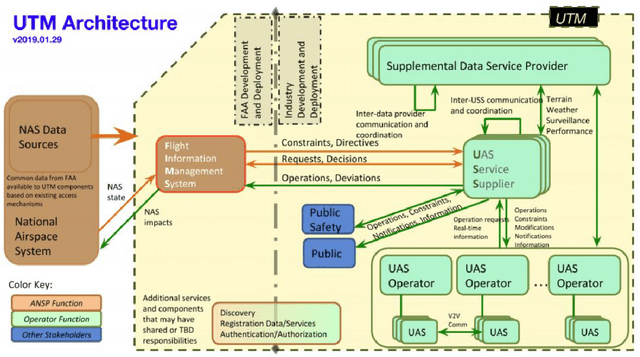
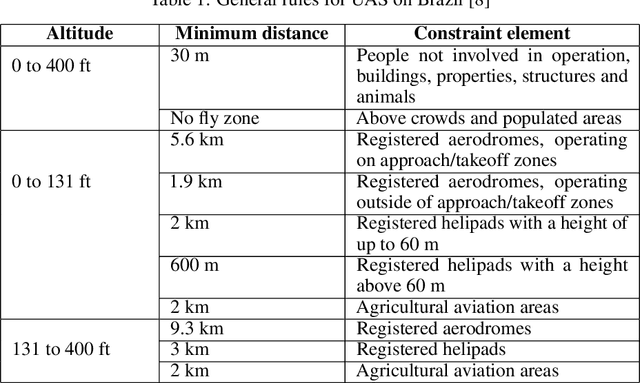
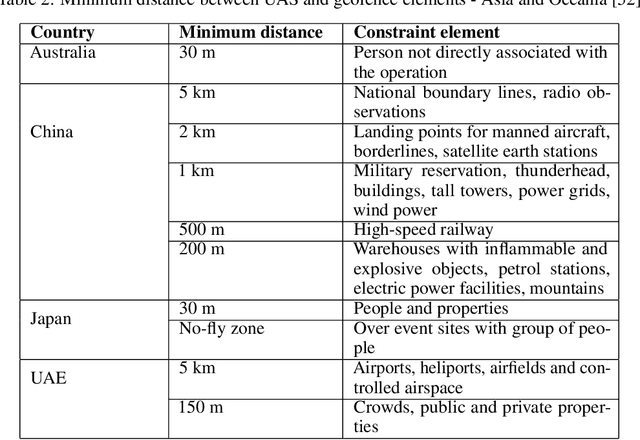
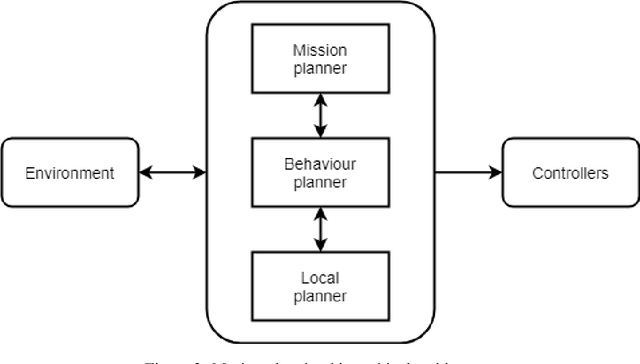
This paper presents a Robot Operating System and Gazebo application to calculate and simulate an optimal route for a drone in an urban environment by developing new ROS packages and executing them along with open-source tools. Firstly, the current regulations about UAS are presented to guide the building of the simulated environment, and multiple path planning algorithms are reviewed to guide the search method selection. After selecting the A-star algorithm, both the 2D and 3D versions of them were implemented in this paper, with both Manhattan and Euclidean distances heuristics. The performance of these algorithms was evaluated considering the distance to be covered by the drone and the execution time of the route planning method, aiming to support algorithm's choice based on the environment in which it will be applied. The algorithm execution time was 3.2 and 17.2 higher when using the Euclidean distance for the 2D and 3D A-star algorithm, respectively. Along with the performance analysis of the algorithm, this paper is also the first step for building a complete UAS Traffic Management (UTM) system simulation using ROS and Gazebo.