 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Augmentation of IMU Signals and Evaluation via a Semi-Supervised Classification of Driving Behavior
Jun 16, 2020



Over the past years, interest in classifying drivers' behavior from data has surged. Such interest is particularly relevant for car insurance companies who, due to privacy constraints, often only have access to data from Inertial Measurement Units (IMU) or similar. In this paper, we present a semi-supervised learning solution to classify portions of trips according to whether drivers are driving aggressively or normally based on such IMU data. Since the amount of labeled IMU data is limited and costly to generate, we utilize Recurrent Conditional Generative Adversarial Networks (RCGAN) to generate more labeled data. Our results show that, by utilizing RCGAN-generated labeled data, the classification of the drivers is improved in 79% of the cases, compared to when the drivers are classified with no generated data.
Extent-Compatible Control Barrier Functions
Jan 20, 2020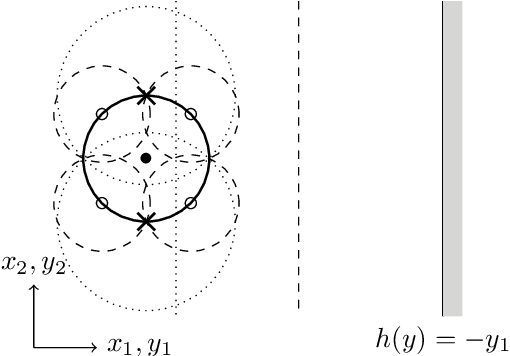

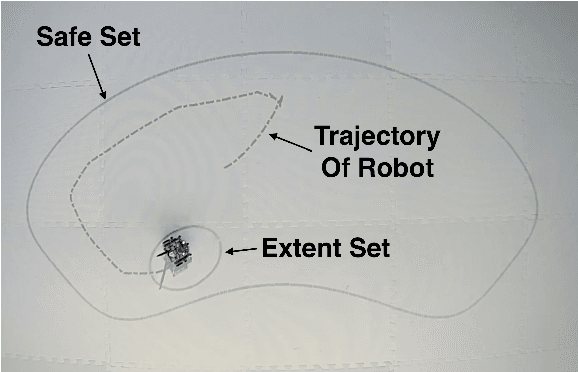
Safety requirements in dynamical systems are commonly enforced with set invariance constraints over a safe region of the state space. Control barrier functions, which are Lyapunov-like functions for guaranteeing set invariance, are an effective tool to enforce such constraints and guarantee safety when the system is represented as a point in the state space. In this paper, we introduce extent-compatible control barrier functions as a tool to enforce safety for the system including its volume (extent) in the physical world. In order to implement the extent-compatible control barrier functions framework, a sum-of-squares based optimization program is proposed. Since sum-of-squares programs can be computationally prohibitive, we additionally introduce a sampling based method in order to retain the computational advantage of a traditional barrier function based quadratic program controller. We prove that the proposed sampling based controller retains the guarantee for safety. Simulation and robotic implementation results are also provided.