 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposing Agents to Minimize Worst-case Risk
Jun 05, 2025From software development to robot control, modern agentic systems decompose complex objectives into a sequence of subtasks and choose a set of specialized AI agents to complete them. We formalize an agentic workflow as a directed acyclic graph, called an agent graph, where edges represent AI agents and paths correspond to feasible compositions of agents. When deploying these systems in the real world, we need to choose compositions of agents that not only maximize the task success, but also minimize risk where the risk captures requirements like safety, fairness, and privacy. This additionally requires carefully analyzing the low-probability (tail) behaviors of compositions of agents. In this work, we consider worst-case risk minimization over the set of feasible agent compositions. We define worst-case risk as the tail quantile -- also known as value-at-risk -- of the loss distribution of the agent composition where the loss quantifies the risk associated with agent behaviors. We introduce an efficient algorithm that traverses the agent graph and finds a near-optimal composition of agents by approximating the value-at-risk via a union bound and dynamic programming. Furthermore, we prove that the approximation is near-optimal asymptotically for a broad class of practical loss functions. To evaluate our framework, we consider a suite of video game-like control benchmarks that require composing several agents trained with reinforcement learning and demonstrate our algorithm's effectiveness in approximating the value-at-risk and identifying the optimal agent composition.
Theoretical foundations for programmatic reinforcement learning
Feb 18, 2024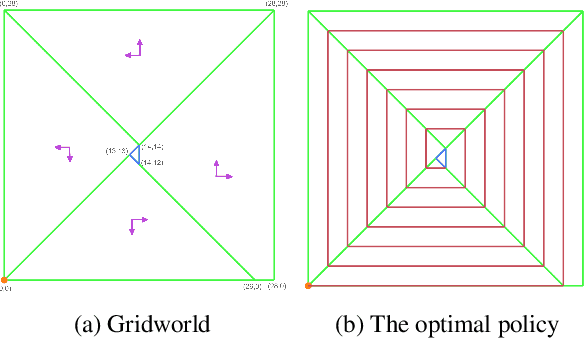
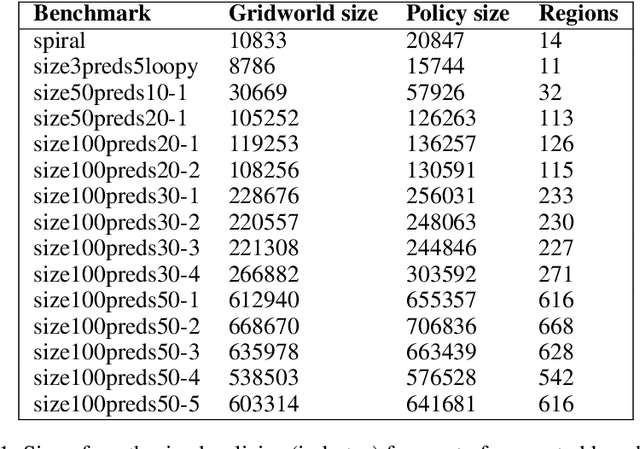
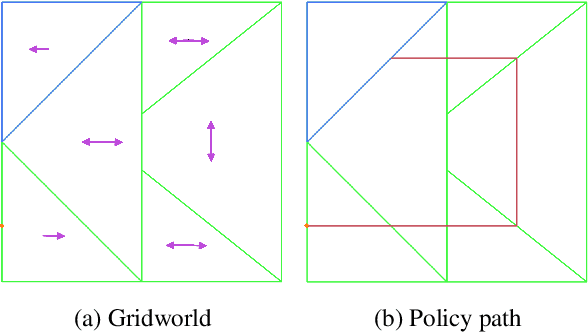
The field of Reinforcement Learning (RL) is concerned with algorithms for learning optimal policies in unknown stochastic environments. Programmatic RL studies representations of policies as programs, meaning involving higher order constructs such as control loops. Despite attracting a lot of attention at the intersection of the machine learning and formal methods communities, very little is known on the theoretical front about programmatic RL: what are good classes of programmatic policies? How large are optimal programmatic policies? How can we learn them? The goal of this paper is to give first answers to these questions, initiating a theoretical study of programmatic RL.