 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal and Spatial Online Integrated Calibration for Camera and LiDAR
Jul 21, 2022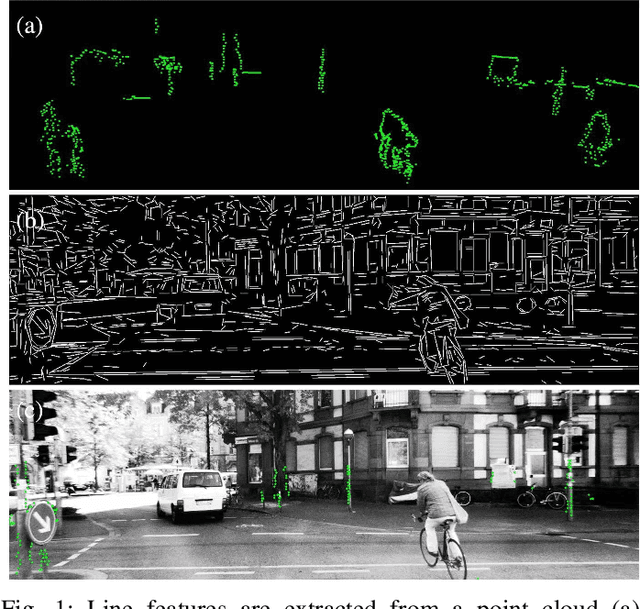
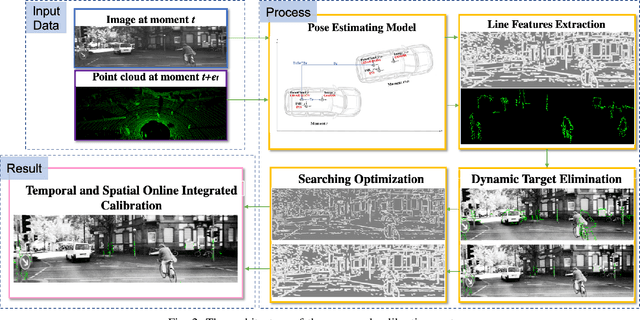
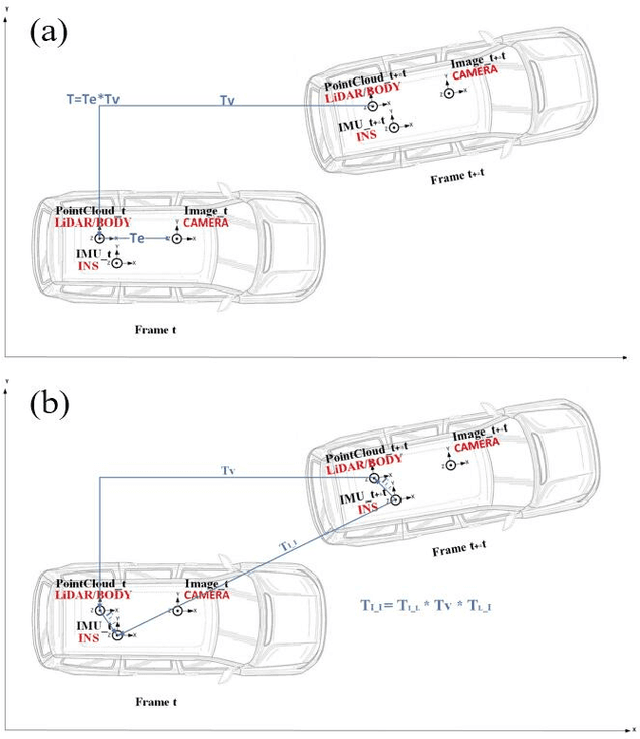
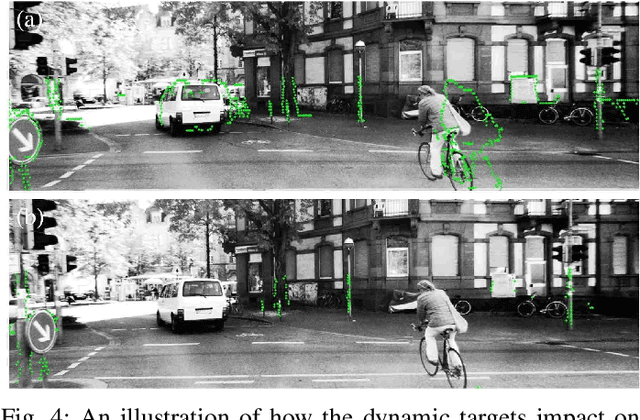
While camera and LiDAR are widely used in most of the assisted and autonomous driving systems, only a few works have been proposed to associate the temporal synchronization and extrinsic calibration for camera and LiDAR which are dedicated to online sensors data fusion. The temporal and spatial calibration technologies are facing the challenges of lack of relevance and real-time. In this paper, we introduce the pose estimation model and environmental robust line features extraction to improve the relevance of data fusion and instant online ability of correction. Dynamic targets eliminating aims to seek optimal policy considering the correspondence of point cloud matching between adjacent moments. The searching optimization process aims to provide accurate parameters with both computation accuracy and efficiency. To demonstrate the benefits of this method, we evaluate it on the KITTI benchmark with ground truth value. In online experiments, our approach improves the accuracy by 38.5\% than the soft synchronization method in temporal calibration. While in spatial calibration, our approach automatically corrects disturbance errors within 0.4 second and achieves an accuracy of 0.3-degree. This work can promote the research and application of sensor fusion.