 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Speed Rotation Estimation with Dynamic Vision Sensors
Sep 06, 2022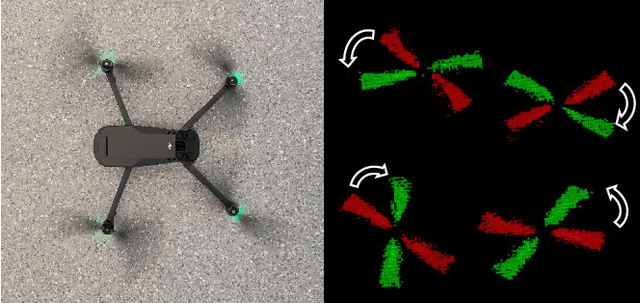



Rotational speed is one of the important metrics to be measured for calibrating the electric motors in manufacturing, monitoring engine during car repairing, faults detection on electrical appliance and etc. However, existing measurement techniques either require prohibitive hardware (e.g., high-speed camera) or are inconvenient to use in real-world application scenarios. In this paper, we propose, EV-Tach, an event-based tachometer via efficient dynamic vision sensing on mobile devices. EV-Tach is designed as a high-fidelity and convenient tachometer by introducing dynamic vision sensor as a new sensing modality to capture the high-speed rotation precisely under various real-world scenarios. By designing a series of signal processing algorithms bespoke for dynamic vision sensing on mobile devices, EV-Tach is able to extract the rotational speed accurately from the event stream produced by dynamic vision sensing on rotary targets. According to our extensive evaluations, the Relative Mean Absolute Error (RMAE) of EV-Tach is as low as 0.03% which is comparable to the state-of-the-art laser tachometer under fixed measurement mode. Moreover, EV-Tach is robust to subtle movement of user's hand, therefore, can be used as a handheld device, where the laser tachometer fails to produce reasonable results.