 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dynamic Model Identification Package for the da Vinci Research Kit
Mar 11, 2019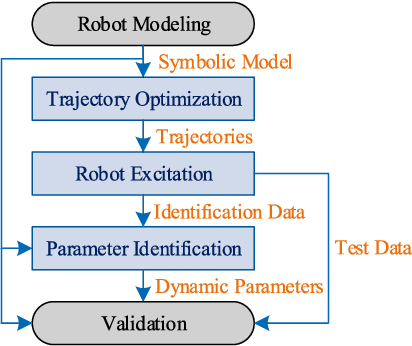

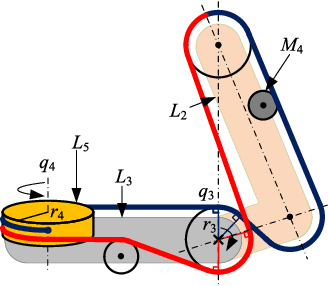

The da Vinci Research Kit (dVRK) is a teleoperated surgical robotic system. For dynamic simulations and modelbased control, the dynamic model of the dVRK with standard dynamic parameters is required. We developed a dynamic model identification package for the dVRK, capable of modeling the parallelograms, springs, counterweight, and tendon couplings, which are inherent to the dVRK. A convex optimization-based method is used to identify the standard dynamic parameters of the dVRK subject to physically feasible constraints. The relative errors between the predicted and measured motor torque are calculated on independent test trajectories, which are less than 16.3% and 18.9% for the first three joints and 34.0% and 26.5% for all joints for the master tool manipulator and patient side manipulator, respectively. We open source the identification software package. Although this software package is originally developed for the dVRK, it is easy to apply it on other robots with similar characteristics to the dVRK through simple configuration.