 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Ground Truth Generation for Evaluating Generative Policy Models
Apr 26, 2019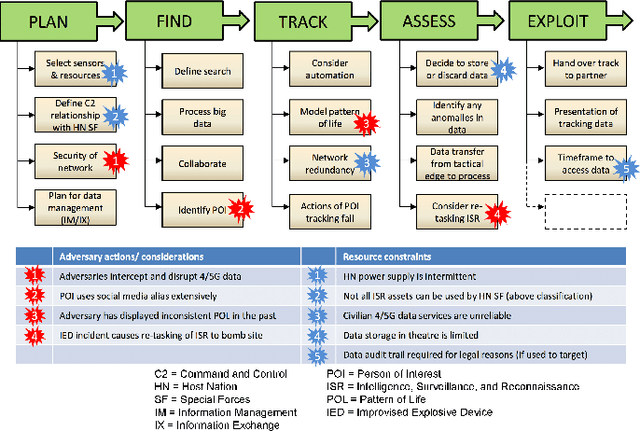
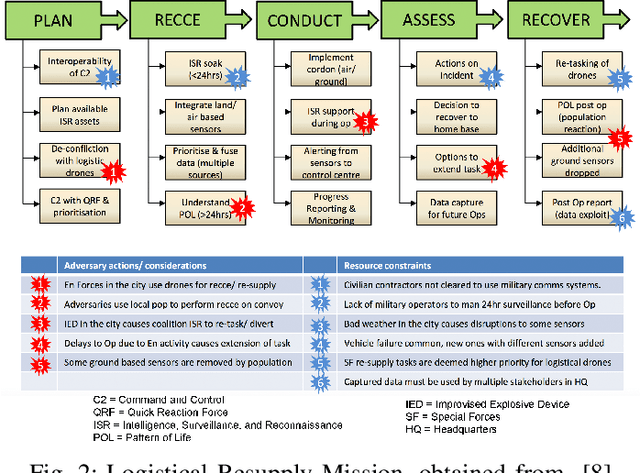
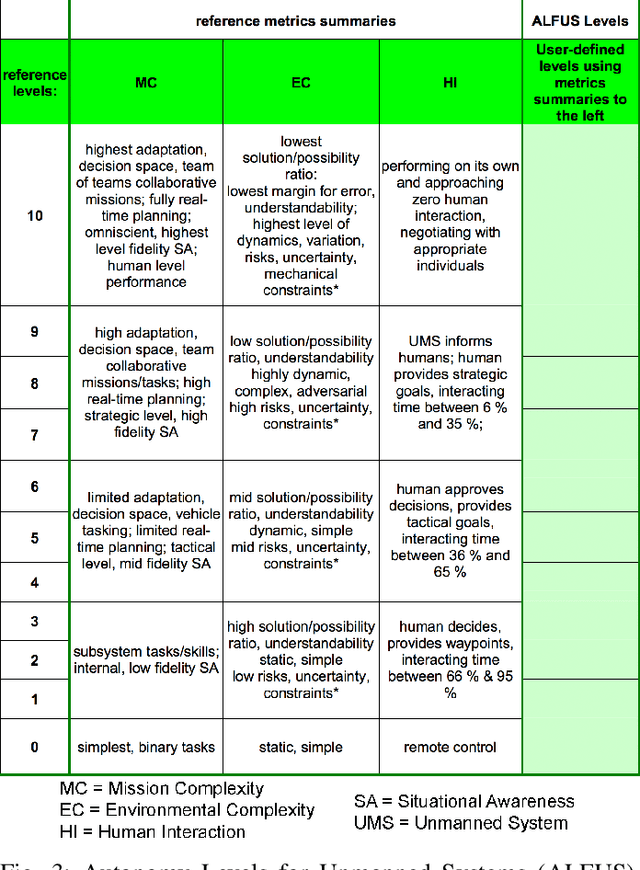
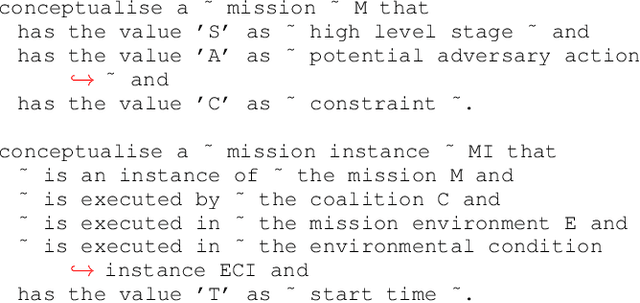
Generative Policy-based Models aim to enable a coalition of systems, be they devices or services to adapt according to contextual changes such as environmental factors, user preferences and different tasks whilst adhering to various constraints and regulations as directed by a managing party or the collective vision of the coalition. Recent developments have proposed new architectures to realize the potential of GPMs but as the complexity of systems and their associated requirements increases, there is an emerging requirement to have scenarios and associated datasets to realistically evaluate GPMs with respect to the properties of the operating environment, be it the future battlespace or an autonomous organization. In order to address this requirement, in this paper, we present a method of applying an agile knowledge representation framework to model requirements, both individualistic and collective that enables synthetic generation of ground truth data such that advanced GPMs can be evaluated robustly in complex environments. We also release conceptual models, annotated datasets, as well as means to extend the data generation approach so that similar datasets can be developed for varying complexities and different situations.
Reasoning about Unreliable Actions
May 03, 2012



We analyse the philosopher Davidson's semantics of actions, using a strongly typed logic with contexts given by sets of partial equations between the outcomes of actions. This provides a perspicuous and elegant treatment of reasoning about action, analogous to Reiter's work on artificial intelligence. We define a sequent calculus for this logic, prove cut elimination, and give a semantics based on fibrations over partial cartesian categories: we give a structure theory for such fibrations. The existence of lax comma objects is necessary for the proof of cut elimination, and we give conditions on the domain fibration of a partial cartesian category for such comma objects to exist.