 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Intensity-Image Reconstruction for Event Cameras Using Manifold Regularisation
Aug 04, 2016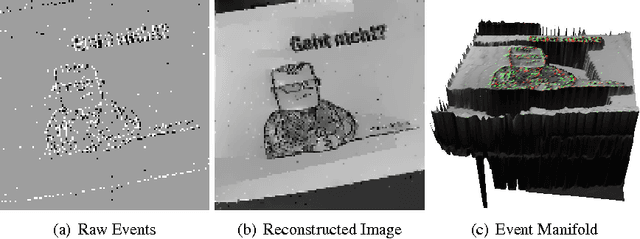
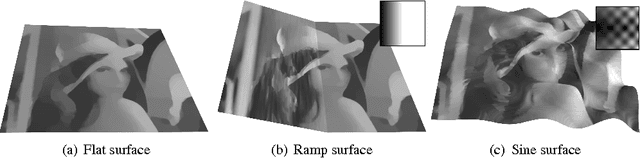
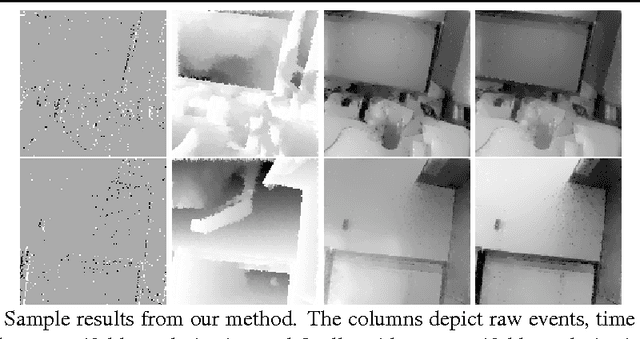
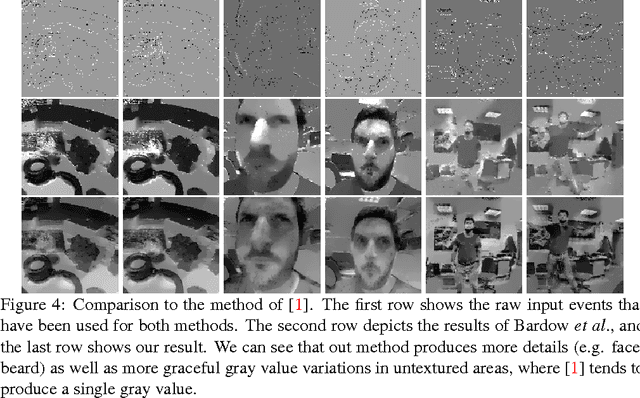
Event cameras or neuromorphic cameras mimic the human perception system as they measure the per-pixel intensity change rather than the actual intensity level. In contrast to traditional cameras, such cameras capture new information about the scene at MHz frequency in the form of sparse events. The high temporal resolution comes at the cost of losing the familiar per-pixel intensity information. In this work we propose a variational model that accurately models the behaviour of event cameras, enabling reconstruction of intensity images with arbitrary frame rate in real-time. Our method is formulated on a per-event-basis, where we explicitly incorporate information about the asynchronous nature of events via an event manifold induced by the relative timestamps of events. In our experiments we verify that solving the variational model on the manifold produces high-quality images without explicitly estimating optical flow.
Solving Dense Image Matching in Real-Time using Discrete-Continuous Optimization
Jan 23, 2016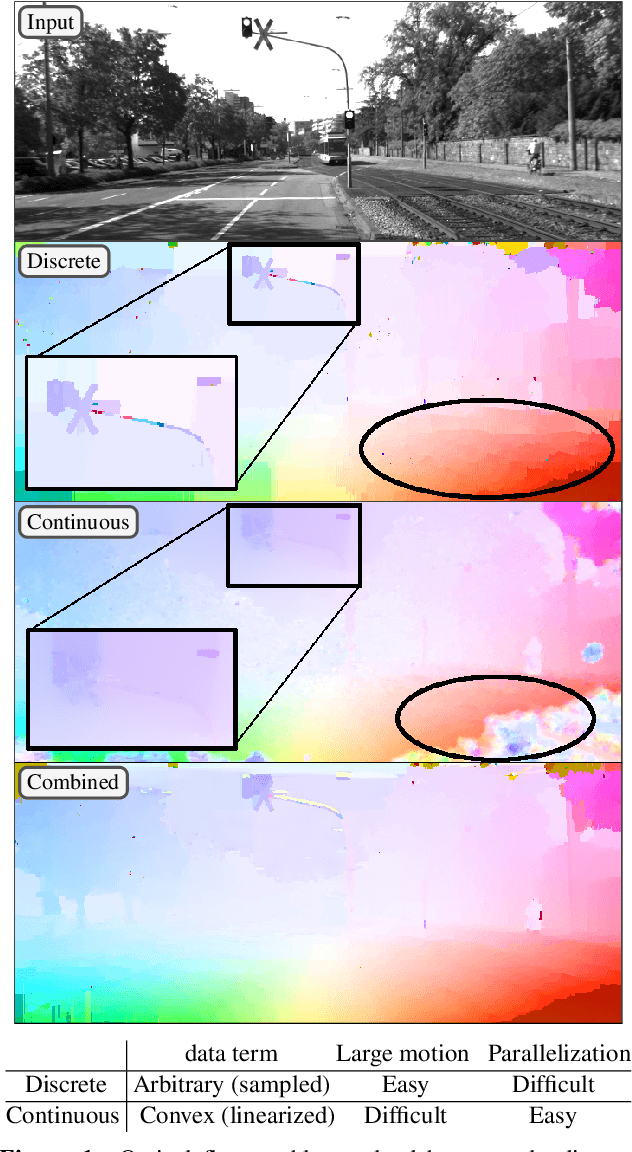
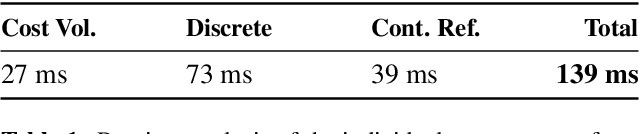
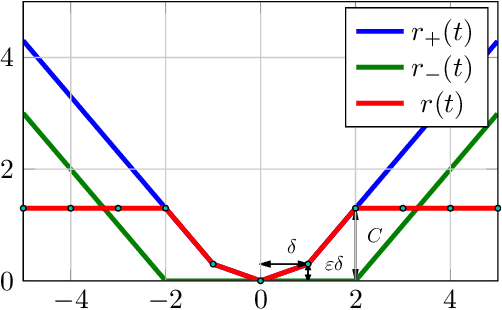
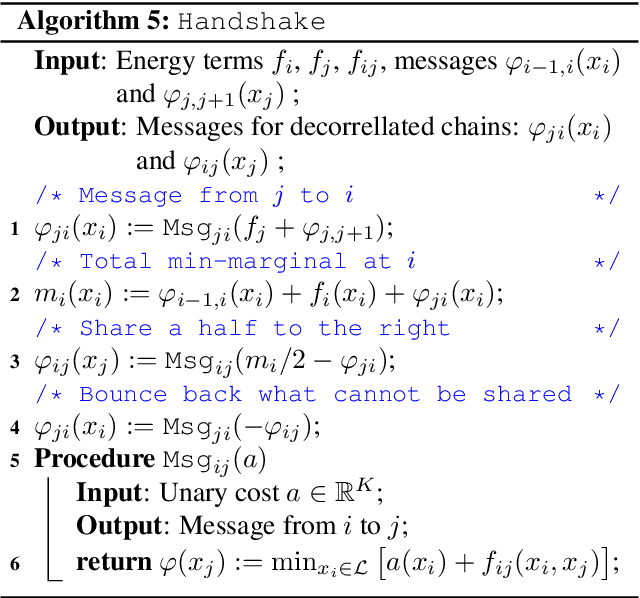
Dense image matching is a fundamental low-level problem in Computer Vision, which has received tremendous attention from both discrete and continuous optimization communities. The goal of this paper is to combine the advantages of discrete and continuous optimization in a coherent framework. We devise a model based on energy minimization, to be optimized by both discrete and continuous algorithms in a consistent way. In the discrete setting, we propose a novel optimization algorithm that can be massively parallelized. In the continuous setting we tackle the problem of non-convex regularizers by a formulation based on differences of convex functions. The resulting hybrid discrete-continuous algorithm can be efficiently accelerated by modern GPUs and we demonstrate its real-time performance for the applications of dense stereo matching and optical flow.