 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Online Data-Driven Emergency-Response Method for Autonomous Agents in Unforeseen Situations
Dec 17, 2021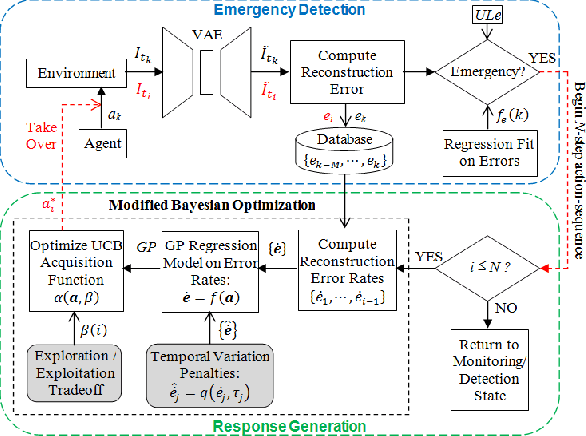
Reinforcement learning agents perform well when presented with inputs within the distribution of those encountered during training. However, they are unable to respond effectively when faced with novel, out-of-distribution events, until they have undergone additional training. This paper presents an online, data-driven, emergency-response method that aims to provide autonomous agents the ability to react to unexpected situations that are very different from those it has been trained or designed to address. In such situations, learned policies cannot be expected to perform appropriately since the observations obtained in these novel situations would fall outside the distribution of inputs that the agent has been optimized to handle. The proposed approach devises a customized response to the unforeseen situation sequentially, by selecting actions that minimize the rate of increase of the reconstruction error from a variational auto-encoder. This optimization is achieved online in a data-efficient manner (on the order of 30 data-points) using a modified Bayesian optimization procedure. We demonstrate the potential of this approach in a simulated 3D car driving scenario, in which the agent devises a response in under 2 seconds to avoid collisions with objects it has not seen during training.
Quality Diversity for Multi-task Optimization
Mar 09, 2020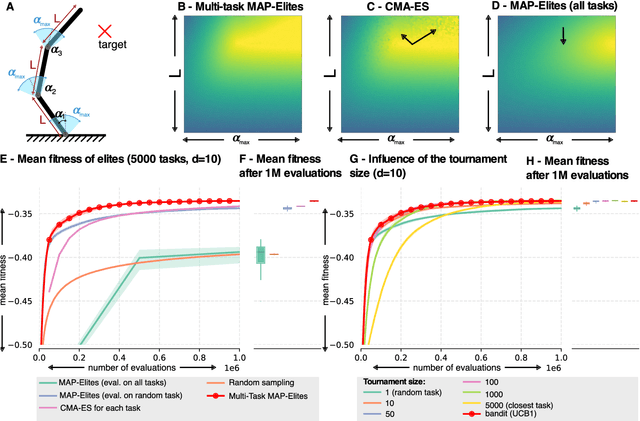
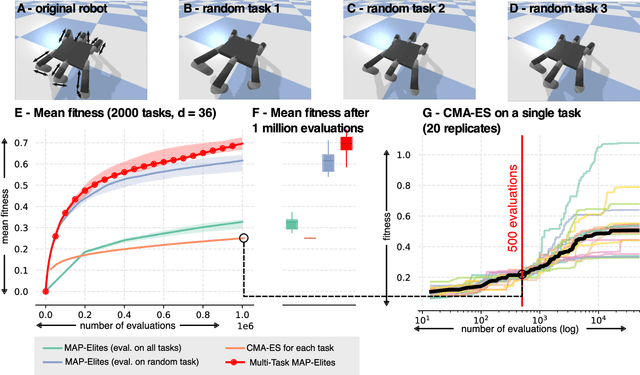

Quality Diversity (QD) algorithms are a recent family of optimization algorithms that search for a large set of diverse but high-performing solutions. Interestingly, they can solve multiple tasks at once. For instance, they can find the joint positions required for a robotic arm to reach a set of points, which can also be solved by running a classic optimizer for each target point. However, they cannot solve multiple tasks when the fitness needs to be evaluated independently for each task (e.g., optimizing policies to grasp many different objects). In this paper, we propose an extension of the MAP-Elites algorithm, called Multi-task MAP-Elites, that solves multiple tasks when the fitness function depends on the task. We evaluate it on a simulated parametrized planar arm (10-dimensional search space; 5000 tasks) and on a 6-legged robot with legs of different lengths (36-dimensional search space; 2000 tasks). The results show that in both cases our algorithm outperforms the optimization of each task separately with the CMA-ES algorithm.