 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTackling Real-World Autonomous Driving using Deep Reinforcement Learning
Jul 05, 2022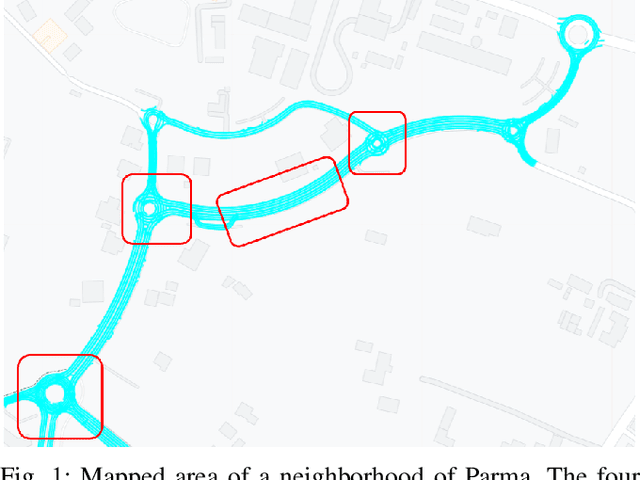
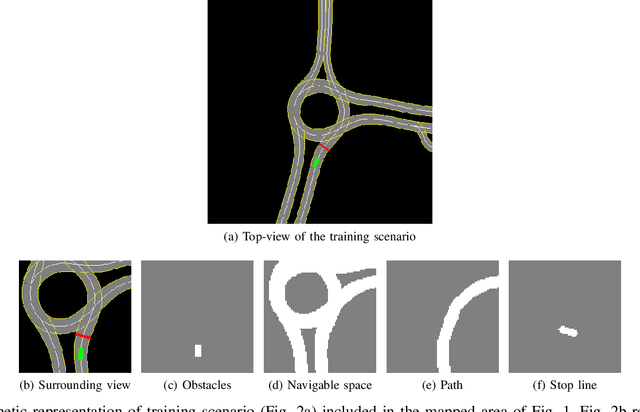
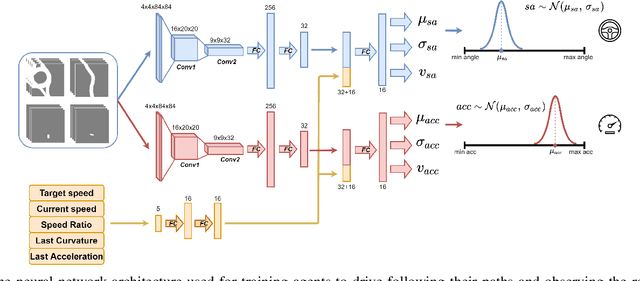
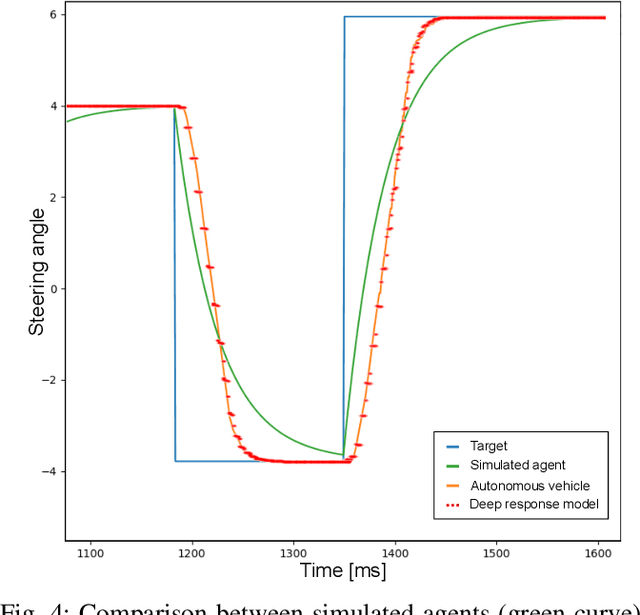
In the typical autonomous driving stack, planning and control systems represent two of the most crucial components in which data retrieved by sensors and processed by perception algorithms are used to implement a safe and comfortable self-driving behavior. In particular, the planning module predicts the path the autonomous car should follow taking the correct high-level maneuver, while control systems perform a sequence of low-level actions, controlling steering angle, throttle and brake. In this work, we propose a model-free Deep Reinforcement Learning Planner training a neural network that predicts both acceleration and steering angle, thus obtaining a single module able to drive the vehicle using the data processed by localization and perception algorithms on board of the self-driving car. In particular, the system that was fully trained in simulation is able to drive smoothly and safely in obstacle-free environments both in simulation and in a real-world urban area of the city of Parma, proving that the system features good generalization capabilities also driving in those parts outside the training scenarios. Moreover, in order to deploy the system on board of the real self-driving car and to reduce the gap between simulated and real-world performances, we also develop a module represented by a tiny neural network able to reproduce the real vehicle dynamic behavior during the training in simulation.
* Oral Presentation at Intelligent Vehicles Symposium 2022
From Simulation to Real World Maneuver Execution using Deep Reinforcement Learning
May 13, 2020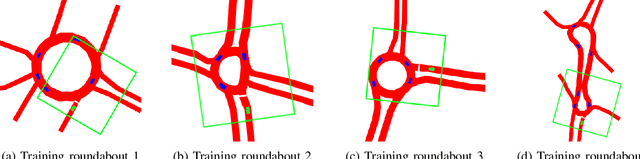
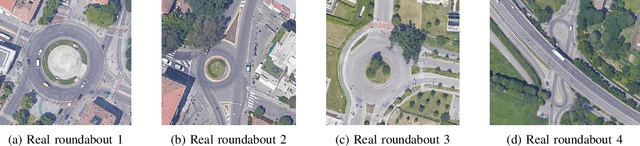
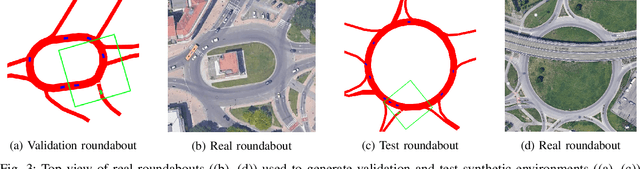
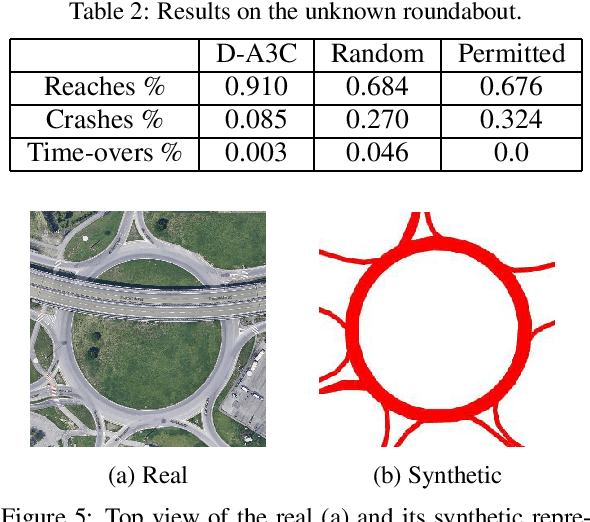
Deep Reinforcement Learning has proved to be able to solve many control tasks in different fields, but the behavior of these systems is not always as expected when deployed in real-world scenarios. This is mainly due to the lack of domain adaptation between simulated and real-world data together with the absence of distinction between train and test datasets. In this work, we investigate these problems in the autonomous driving field, especially for a maneuver planning module for roundabout insertions. In particular, we present a system based on multiple environments in which agents are trained simultaneously, evaluating the behavior of the model in different scenarios. Finally, we analyze techniques aimed at reducing the gap between simulated and real-world data showing that this increased the generalization capabilities of the system both on unseen and real-world scenarios.
Intelligent Roundabout Insertion using Deep Reinforcement Learning
Jan 03, 2020
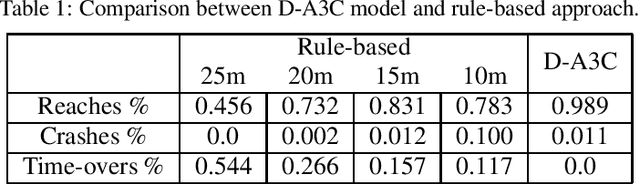

An important topic in the autonomous driving research is the development of maneuver planning systems. Vehicles have to interact and negotiate with each other so that optimal choices, in terms of time and safety, are taken. For this purpose, we present a maneuver planning module able to negotiate the entering in busy roundabouts. The proposed module is based on a neural network trained to predict when and how entering the roundabout throughout the whole duration of the maneuver. Our model is trained with a novel implementation of A3C, which we will call Delayed A3C (D-A3C), in a synthetic environment where vehicles move in a realistic manner with interaction capabilities. In addition, the system is trained such that agents feature a unique tunable behavior, emulating real world scenarios where drivers have their own driving styles. Similarly, the maneuver can be performed using different aggressiveness levels, which is particularly useful to manage busy scenarios where conservative rule-based policies would result in undefined waits.
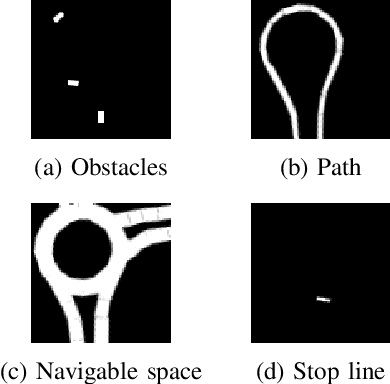
Microscopic Traffic Simulation by Cooperative Multi-agent Deep Reinforcement Learning
Mar 04, 2019



Expert human drivers perform actions relying on traffic laws and their previous experience. While traffic laws are easily embedded into an artificial brain, modeling human complex behaviors which come from past experience is a more challenging task. One of these behaviors is the capability of communicating intentions and negotiating the right of way through driving actions, as when a driver is entering a crowded roundabout and observes other cars movements to guess the best time to merge in. In addition, each driver has its own unique driving style, which is conditioned by both its personal characteristics, such as age and quality of sight, and external factors, such as being late or in a bad mood. For these reasons, the interaction between different drivers is not trivial to simulate in a realistic manner. In this paper, this problem is addressed by developing a microscopic simulator using a Deep Reinforcement Learning Algorithm based on a combination of visual frames, representing the perception around the vehicle, and a vector of numerical parameters. In particular, the algorithm called Asynchronous Advantage Actor-Critic has been extended to a multi-agent scenario in which every agent needs to learn to interact with other similar agents. Moreover, the model includes a novel architecture such that the driving style of each vehicle is adjustable by tuning some of its input parameters, permitting to simulate drivers with different levels of aggressiveness and desired cruising speeds.