 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially-Aware Opinion-Based Navigation with Oval Limit Cycles
Nov 07, 2024
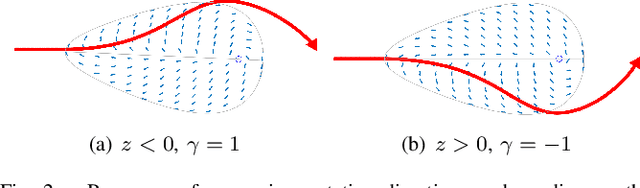
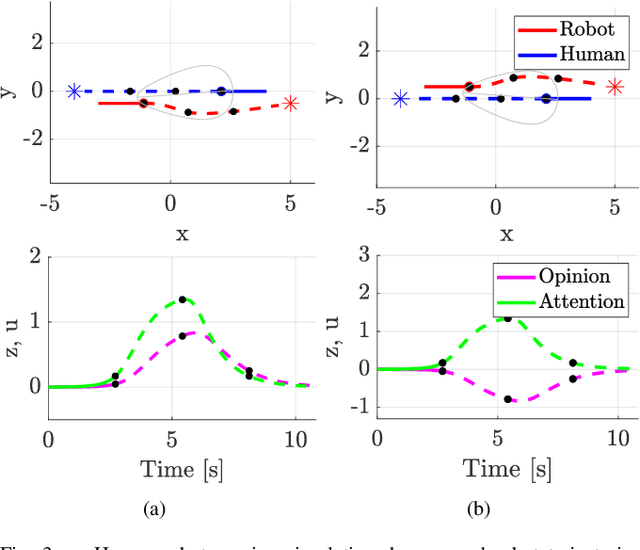
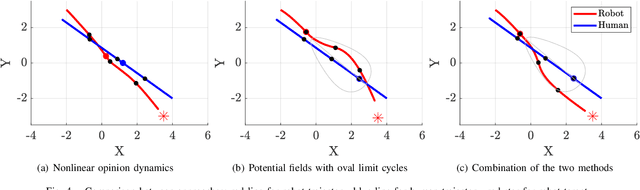
When humans move in a shared space, they choose navigation strategies that preserve their mutual safety. At the same time, each human seeks to minimise the number of modifications to her/his path. In order to achieve this result, humans use unwritten rules and reach a consensus on their decisions about the motion direction by exchanging non-verbal messages. They then implement their choice in a mutually acceptable way. Socially-aware navigation denotes a research effort aimed at replicating this logic inside robots. Existing results focus either on how robots can participate in negotiations with humans, or on how they can move in a socially acceptable way. We propose a holistic approach in which the two aspects are jointly considered. Specifically, we show that by combining opinion dynamics (to reach a consensus) with vortex fields (to generate socially acceptable trajectories), the result outperforms the application of the two techniques in isolation.