 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltra-low-power Range Error Mitigation for Ultra-wideband Precise Localization
Sep 07, 2022

Precise and accurate localization in outdoor and indoor environments is a challenging problem that currently constitutes a significant limitation for several practical applications. Ultra-wideband (UWB) localization technology represents a valuable low-cost solution to the problem. However, non-line-of-sight (NLOS) conditions and complexity of the specific radio environment can easily introduce a positive bias in the ranging measurement, resulting in highly inaccurate and unsatisfactory position estimation. In the light of this, we leverage the latest advancement in deep neural network optimization techniques and their implementation on ultra-low-power microcontrollers to introduce an effective range error mitigation solution that provides corrections in either NLOS or LOS conditions with a few mW of power. Our extensive experimentation endorses the advantages and improvements of our low-cost and power-efficient methodology.
Robust Ultra-wideband Range Error Mitigation with Deep Learning at the Edge
Nov 30, 2020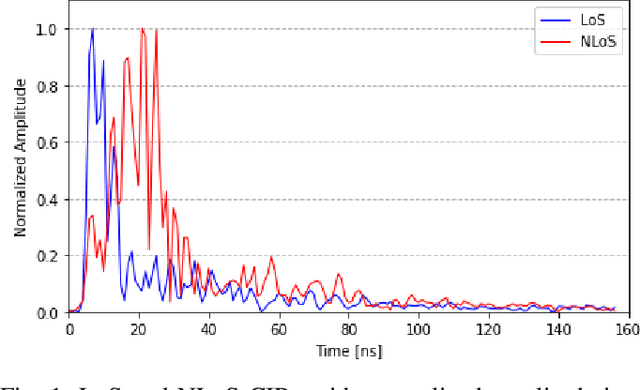
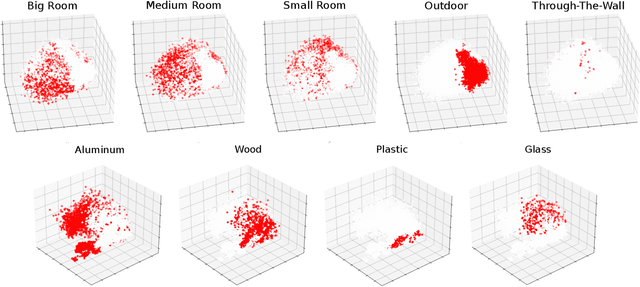
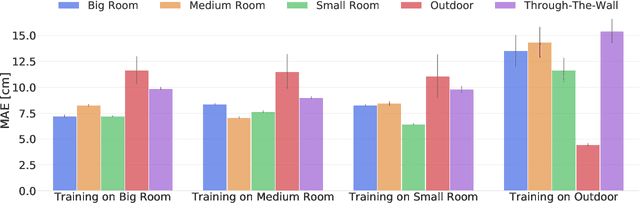
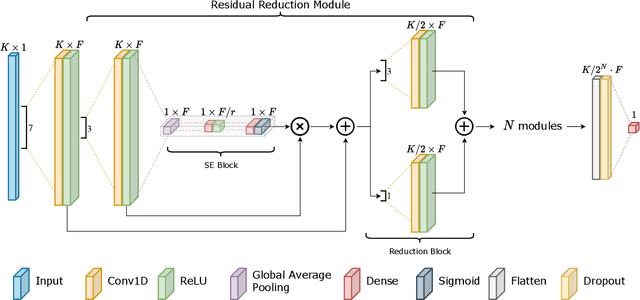
Ultra-wideband (UWB) is the state-of-the-art and most popular technology for wireless localization. Nevertheless, precise ranging and localization in non-line-of-sight (NLoS) conditions is still an open research topic. Indeed, multipath effects, reflections, refractions and complexity of the indoor radio environment can easily introduce a positive bias in the ranging measurement, resulting in highly inaccurate and unsatisfactory position estimation. This article proposes an efficient representation learning methodology that exploits the latest advancement in deep learning and graph optimization techniques to achieve effective ranging error mitigation at the edge. Channel Impulse Response (CIR) signals are directly exploited to extract high semantic features to estimate corrections in either NLoS or LoS conditions. Extensive experimentation with different settings and configurations have proved the effectiveness of our methodology and demonstrated the feasibility of a robust and low computational power UWB range error mitigation.
Indoor Point-to-Point Navigation with Deep Reinforcement Learning and Ultra-wideband
Nov 18, 2020
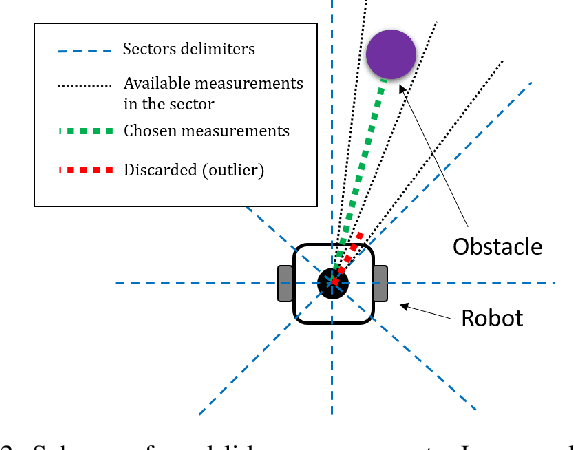

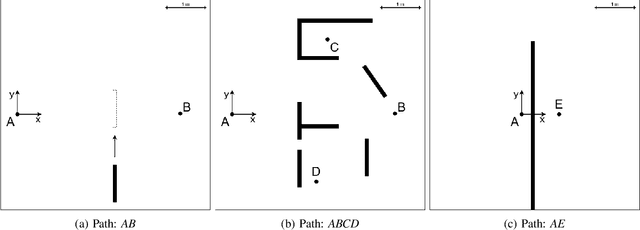
Indoor autonomous navigation requires a precise and accurate localization system able to guide robots through cluttered, unstructured and dynamic environments. Ultra-wideband (UWB) technology, as an indoor positioning system, offers precise localization and tracking, but moving obstacles and non-line-of-sight occurrences can generate noisy and unreliable signals. That, combined with sensors noise, unmodeled dynamics and environment changes can result in a failure of the guidance algorithm of the robot. We demonstrate how a power-efficient and low computational cost point-to-point local planner, learnt with deep reinforcement learning (RL), combined with UWB localization technology can constitute a robust and resilient to noise short-range guidance system complete solution. We trained the RL agent on a simulated environment that encapsulates the robot dynamics and task constraints and then, we tested the learnt point-to-point navigation policies in a real setting with more than two-hundred experimental evaluations using UWB localization. Our results show that the computational efficient end-to-end policy learnt in plain simulation, that directly maps low-range sensors signals to robot controls, deployed in combination with ultra-wideband noisy localization in a real environment, can provide a robust, scalable and at-the-edge low-cost navigation system solution.