 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdapting User Interfaces with Model-based Reinforcement Learning
Mar 11, 2021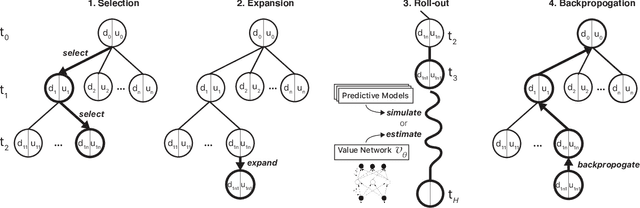
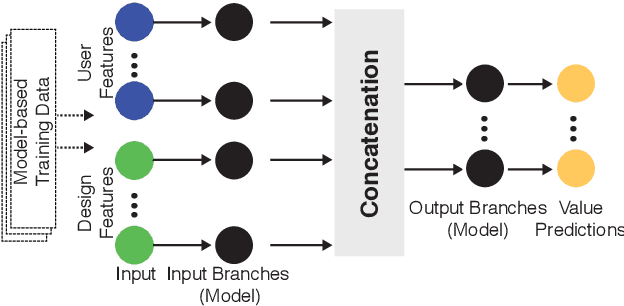
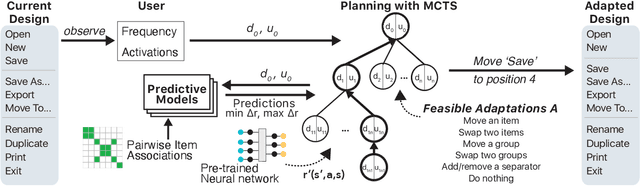
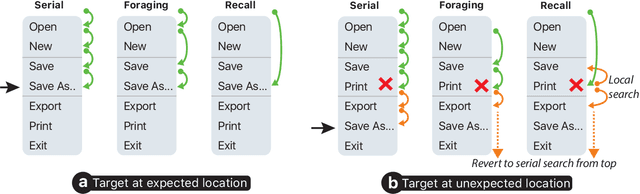
Adapting an interface requires taking into account both the positive and negative effects that changes may have on the user. A carelessly picked adaptation may impose high costs to the user -- for example, due to surprise or relearning effort -- or "trap" the process to a suboptimal design immaturely. However, effects on users are hard to predict as they depend on factors that are latent and evolve over the course of interaction. We propose a novel approach for adaptive user interfaces that yields a conservative adaptation policy: It finds beneficial changes when there are such and avoids changes when there are none. Our model-based reinforcement learning method plans sequences of adaptations and consults predictive HCI models to estimate their effects. We present empirical and simulation results from the case of adaptive menus, showing that the method outperforms both a non-adaptive and a frequency-based policy.
CoVR: A Large-Scale Force-Feedback Robotic Interface for Non-Deterministic Scenarios in VR
Sep 15, 2020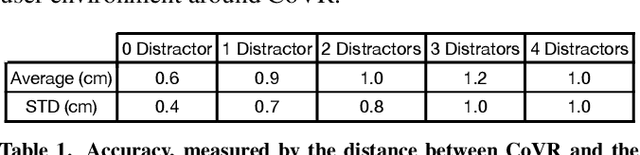
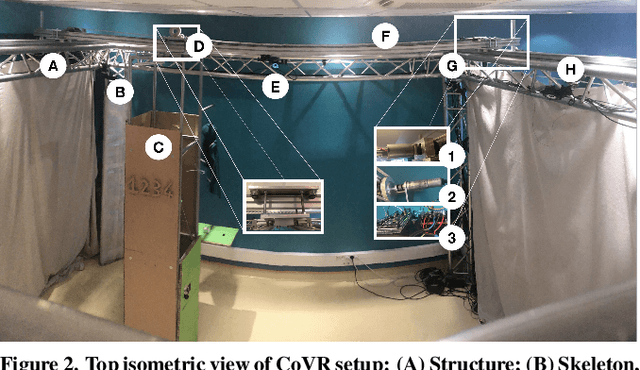
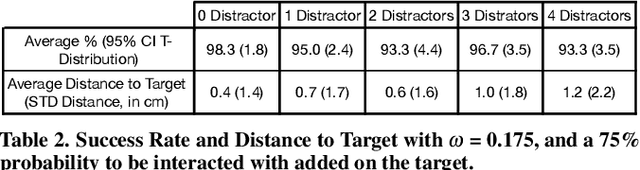
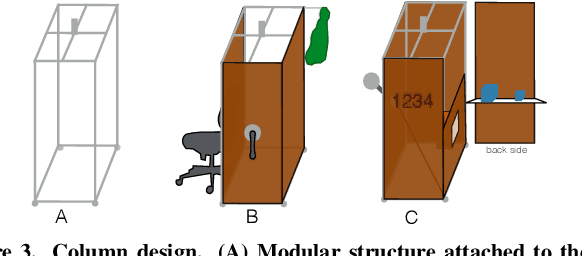
We present CoVR, a novel robotic interface providing strong kinesthetic feedback (100 N) in a room-scale VR arena. It consists of a physical column mounted on a 2D Cartesian ceiling robot (XY displacements) with the capacity of (1) resisting to body-scaled users' actions such as pushing or leaning; (2) acting on the users by pulling or transporting them as well as (3) carrying multiple potentially heavy objects (up to 80kg) that users can freely manipulate or make interact with each other. We describe its implementation and define a trajectory generation algorithm based on a novel user intention model to support non-deterministic scenarios, where the users are free to interact with any virtual object of interest with no regards to the scenarios' progress. A technical evaluation and a user study demonstrate the feasibility and usability of CoVR, as well as the relevance of whole-body interactions involving strong forces, such as being pulled through or transported.