Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep execution monitor for robot assistive tasks
Feb 07, 2019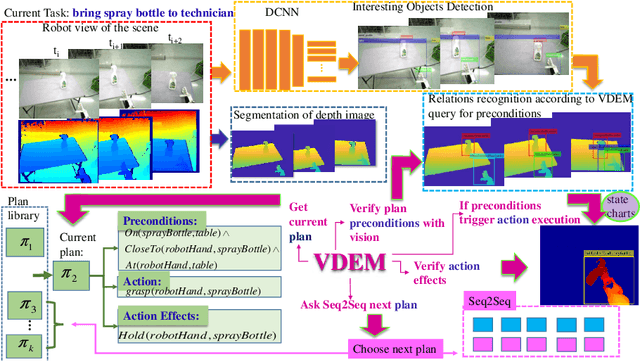
We consider a novel approach to high-level robot task execution for a robot assistive task. In this work we explore the problem of learning to predict the next subtask by introducing a deep model for both sequencing goals and for visually evaluating the state of a task. We show that deep learning for monitoring robot tasks execution very well supports the interconnection between task-level planning and robot operations. These solutions can also cope with the natural non-determinism of the execution monitor. We show that a deep execution monitor leverages robot performance. We measure the improvement taking into account some robot helping tasks performed at a warehouse.
Via