 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSetting Up the Beam for Human-Centered Service Tasks
Oct 18, 2017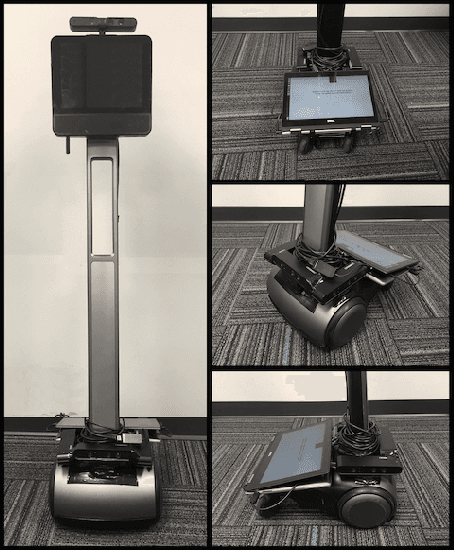
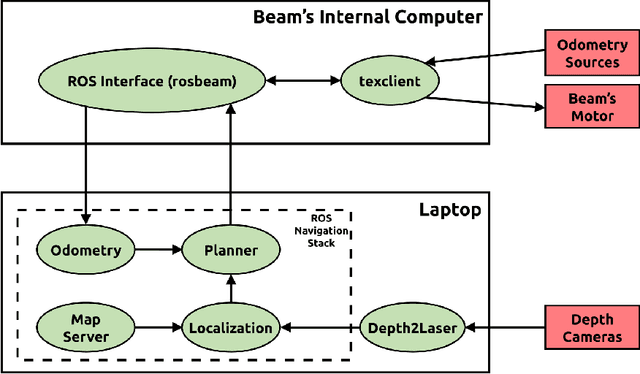
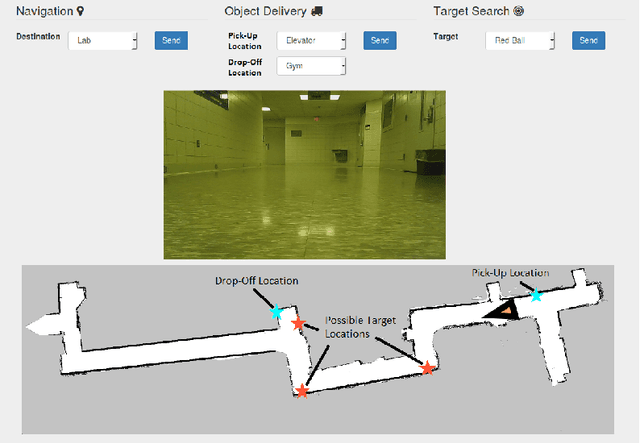
We introduce the Beam, a collaborative autonomous mobile service robot, based on SuitableTech's Beam telepresence system. We present a set of enhancements to the telepresence system, including autonomy, human awareness, increased computation and sensing capabilities, and integration with the popular Robot Operating System (ROS) framework. Together, our improvements transform the Beam into a low-cost platform for research on service robots. We examine the Beam on target search and object delivery tasks and demonstrate that the robot achieves a 100% success rate.
Exponential Natural Particle Filter
Nov 20, 2015

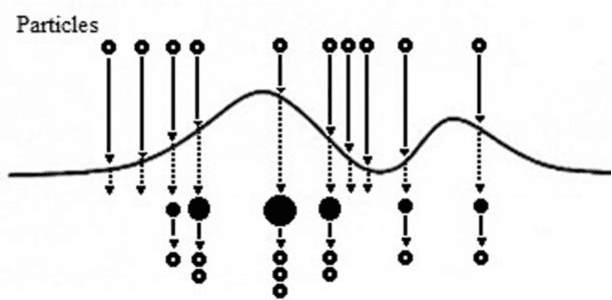

Particle Filter algorithm (PF) suffers from some problems such as the loss of particle diversity, the need for large number of particles, and the costly selection of the importance density functions. In this paper, a novel Exponential Natural Particle Filter (xNPF) is introduced to solve the above problems. In this approach, a state transitional probability with the use of natural gradient learning is proposed which balances exploration and exploitation more robustly. The results show that xNPF converges much closer to the true target states than the other state of the art particle filter.