 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat is Wrong with Continual Learning in Medical Image Segmentation?
Oct 21, 2020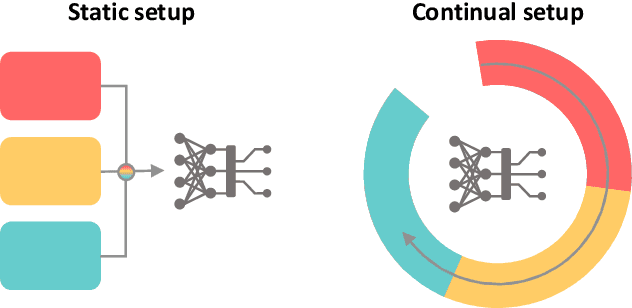
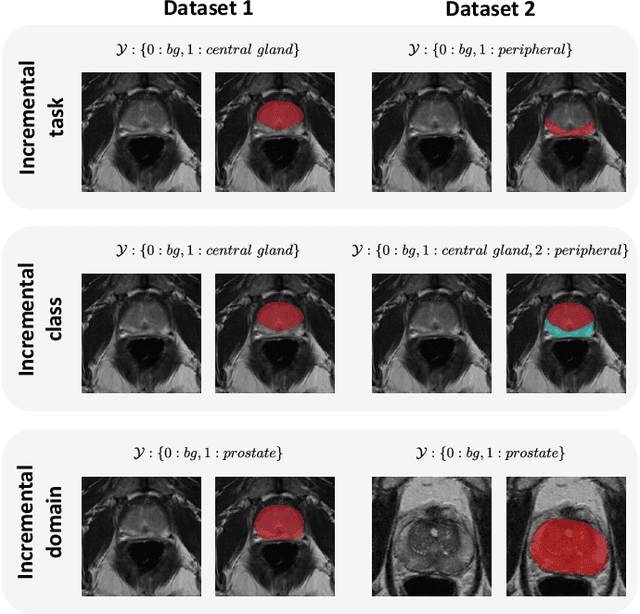
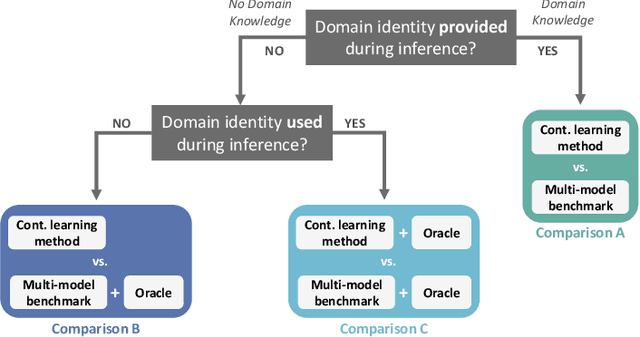

Continual learning protocols are attracting increasing attention from the medical imaging community. In a continual setup, data from different sources arrives sequentially and each batch is only available for a limited period. Given the inherent privacy risks associated with medical data, this setup reflects the reality of deployment for deep learning diagnostic radiology systems. Many techniques exist to learn continuously for classification tasks, and several have been adapted to semantic segmentation. Yet most have at least one of the following flaws: a) they rely too heavily on domain identity information during inference, or b) data as seen in early training stages does not profit from training with later data. In this work, we propose an evaluation framework that addresses both concerns, and introduce a fair multi-model benchmark. We show that the benchmark outperforms two popular continual learning methods for the task of T2-weighted MR prostate segmentation.
Planning Nonlinear Access Paths for Temporal Bone Surgery
Feb 21, 2018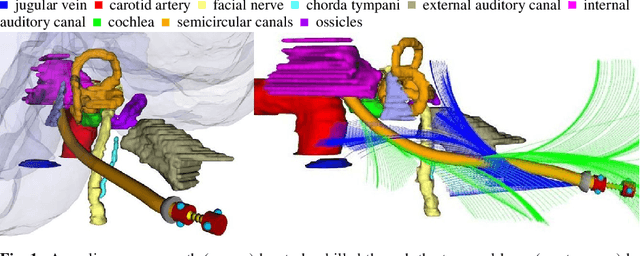


Purpose: Interventions at the otobasis operate in the narrow region of the temporal bone where several highly sensitive organs define obstacles with minimal clearance for surgical instruments. Nonlinear trajectories for potential minimally-invasive interventions can provide larger distances to risk structures and optimized orientations of surgical instruments, thus improving clinical outcomes when compared to existing linear approaches. In this paper, we present fast and accurate planning methods for such nonlinear access paths. Methods: We define a specific motion planning problem in SE(3) = R3 x SO(3) with notable constraints in computation time and goal pose that reflect the requirements of temporal bone surgery.We then present k-RRT-Connect: two suitable motion planners based on bidirectional Rapidly-exploring Random Trees (RRT) to solve this problem efficiently. Results: The benefits of k-RRT-Connect are demonstrated on real CT data of patients. Their general performance is shown on a large set of realistic synthetic anatomies. We also show that these new algorithms outperform state of the art methods based on circular arcs or Bezier-Splines when applied to this specific problem. Conclusion: With this work we demonstrate that pre- and intra-operative planning of nonlinear access paths is possible for minimally-invasive surgeries at the otobasis.