 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to track your dragon: A Multi-Attentional Framework for real-time RGB-D 6-DOF Object Pose Tracking
Apr 21, 2020
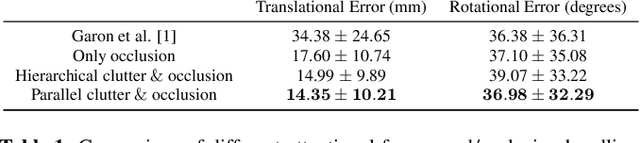
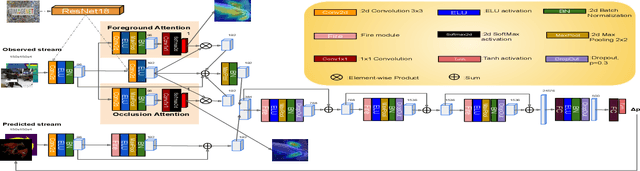
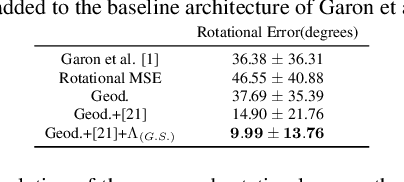
We present a novel multi-attentional convolutional architecture to tackle the problem of real-time RGB-D 6D object pose tracking of single, known objects. Such a problem poses multiple challenges originating both from the objects' nature and their interaction with their environment, which previous approaches have failed to fully address. The proposed framework encapsulates methods for background clutter and occlusion handling by integrating multiple parallel soft spatial attention modules into a multitask Convolutional Neural Network (CNN) architecture. Moreover, we consider the special geometrical properties of both the object's 3D model and the pose space, and we use a more sophisticated approach for data augmentation for training. The provided experimental results confirm the effectiveness of the proposed multi-attentional architecture, as it improves the State-of-the-Art (SoA) tracking performance by an average score of 40.5% for translation and 57.5% for rotation, when testing on the dataset presented in [1], the most complete dataset designed, up to date, for the problem of RGB-D object tracking.