 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning safe, constrained policies via imitation learning: Connection to Probabilistic Inference and a Naive Algorithm
Jul 09, 2025This article introduces an imitation learning method for learning maximum entropy policies that comply with constraints demonstrated by expert trajectories executing a task. The formulation of the method takes advantage of results connecting performance to bounds for the KL-divergence between demonstrated and learned policies, and its objective is rigorously justified through a connection to a probabilistic inference framework for reinforcement learning, incorporating the reinforcement learning objective and the objective to abide by constraints in an entropy maximization setting. The proposed algorithm optimizes the learning objective with dual gradient descent, supporting effective and stable training. Experiments show that the proposed method can learn effective policy models for constraints-abiding behaviour, in settings with multiple constraints of different types, accommodating different modalities of demonstrated behaviour, and with abilities to generalize.
An Extended Benchmarking of Multi-Agent Reinforcement Learning Algorithms in Complex Fully Cooperative Tasks
Feb 07, 2025



Multi-Agent Reinforcement Learning (MARL) has recently emerged as a significant area of research. However, MARL evaluation often lacks systematic diversity, hindering a comprehensive understanding of algorithms' capabilities. In particular, cooperative MARL algorithms are predominantly evaluated on benchmarks such as SMAC and GRF, which primarily feature team game scenarios without assessing adequately various aspects of agents' capabilities required in fully cooperative real-world tasks such as multi-robot cooperation and warehouse, resource management, search and rescue, and human-AI cooperation. Moreover, MARL algorithms are mainly evaluated on low dimensional state spaces, and thus their performance on high-dimensional (e.g., image) observations is not well-studied. To fill this gap, this paper highlights the crucial need for expanding systematic evaluation across a wider array of existing benchmarks. To this end, we conduct extensive evaluation and comparisons of well-known MARL algorithms on complex fully cooperative benchmarks, including tasks with images as agents' observations. Interestingly, our analysis shows that many algorithms, hailed as state-of-the-art on SMAC and GRF, may underperform standard MARL baselines on fully cooperative benchmarks. Finally, towards more systematic and better evaluation of cooperative MARL algorithms, we have open-sourced PyMARLzoo+, an extension of the widely used (E)PyMARL libraries, which addresses an open challenge from [TBG++21], facilitating seamless integration and support with all benchmarks of PettingZoo, as well as Overcooked, PressurePlate, Capture Target and Box Pushing.
Automating the resolution of flight conflicts: Deep reinforcement learning in service of air traffic controllers
Jun 15, 2022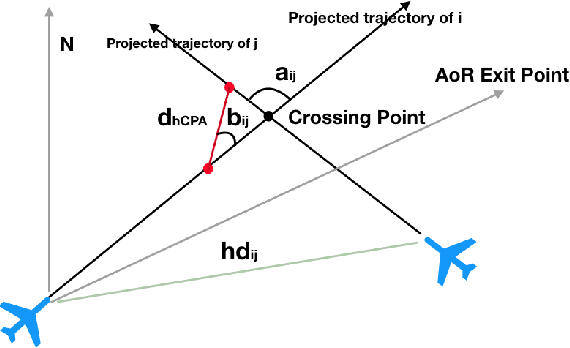
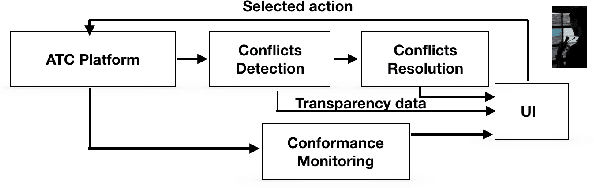

Dense and complex air traffic scenarios require higher levels of automation than those exhibited by tactical conflict detection and resolution (CD\&R) tools that air traffic controllers (ATCO) use today. However, the air traffic control (ATC) domain, being safety critical, requires AI systems to which operators are comfortable to relinquishing control, guaranteeing operational integrity and automation adoption. Two major factors towards this goal are quality of solutions, and transparency in decision making. This paper proposes using a graph convolutional reinforcement learning method operating in a multiagent setting where each agent (flight) performs a CD\&R task, jointly with other agents. We show that this method can provide high-quality solutions with respect to stakeholders interests (air traffic controllers and airspace users), addressing operational transparency issues.