 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoLD Fusion: A Real-time Capable Spline-based Fusion Algorithm for Collective Lane Detection
Dec 16, 2025Comprehensive environment perception is essential for autonomous vehicles to operate safely. It is crucial to detect both dynamic road users and static objects like traffic signs or lanes as these are required for safe motion planning. However, in many circumstances a complete perception of other objects or lanes is not achievable due to limited sensor ranges, occlusions, and curves. In scenarios where an accurate localization is not possible or for roads where no HD maps are available, an autonomous vehicle must rely solely on its perceived road information. Thus, extending local sensing capabilities through collective perception using vehicle-to-vehicle communication is a promising strategy that has not yet been explored for lane detection. Therefore, we propose a real-time capable approach for collective perception of lanes using a spline-based estimation of undetected road sections. We evaluate our proposed fusion algorithm in various situations and road types. We were able to achieve real-time capability and extend the perception range by up to 200%.
A Comprehensive Safety Metric to Evaluate Perception in Autonomous Systems
Dec 16, 2025Complete perception of the environment and its correct interpretation is crucial for autonomous vehicles. Object perception is the main component of automotive surround sensing. Various metrics already exist for the evaluation of object perception. However, objects can be of different importance depending on their velocity, orientation, distance, size, or the potential damage that could be caused by a collision due to a missed detection. Thus, these additional parameters have to be considered for safety evaluation. We propose a new safety metric that incorporates all these parameters and returns a single easily interpretable safety assessment score for object perception. This new metric is evaluated with both real world and virtual data sets and compared to state of the art metrics.
MR3D-Net: Dynamic Multi-Resolution 3D Sparse Voxel Grid Fusion for LiDAR-Based Collective Perception
Aug 12, 2024The safe operation of automated vehicles depends on their ability to perceive the environment comprehensively. However, occlusion, sensor range, and environmental factors limit their perception capabilities. To overcome these limitations, collective perception enables vehicles to exchange information. However, fusing this exchanged information is a challenging task. Early fusion approaches require large amounts of bandwidth, while intermediate fusion approaches face interchangeability issues. Late fusion of shared detections is currently the only feasible approach. However, it often results in inferior performance due to information loss. To address this issue, we propose MR3D-Net, a dynamic multi-resolution 3D sparse voxel grid fusion backbone architecture for LiDAR-based collective perception. We show that sparse voxel grids at varying resolutions provide a meaningful and compact environment representation that can adapt to the communication bandwidth. MR3D-Net achieves state-of-the-art performance on the OPV2V 3D object detection benchmark while reducing the required bandwidth by up to 94% compared to early fusion. Code is available at https://github.com/ekut-es/MR3D-Net
LSM: A Comprehensive Metric for Assessing the Safety of Lane Detection Systems in Autonomous Driving
Jul 10, 2024Comprehensive perception of the vehicle's environment and correct interpretation of the environment are crucial for the safe operation of autonomous vehicles. The perception of surrounding objects is the main component for further tasks such as trajectory planning. However, safe trajectory planning requires not only object detection, but also the detection of drivable areas and lane corridors. While first approaches consider an advanced safety evaluation of object detection, the evaluation of lane detection still lacks sufficient safety metrics. Similar to the safety metrics for object detection, additional factors such as the semantics of the scene with road type and road width, the detection range as well as the potential causes of missing detections, incorporated by vehicle speed, should be considered for the evaluation of lane detection. Therefore, we propose the Lane Safety Metric (LSM), which takes these factors into account and allows to evaluate the safety of lane detection systems by determining an easily interpretable safety score. We evaluate our offline safety metric on various virtual scenarios using different lane detection approaches and compare it with state-of-the-art performance metrics.
Collective Perception Datasets for Autonomous Driving: A Comprehensive Review
May 27, 2024



To ensure safe operation of autonomous vehicles in complex urban environments, complete perception of the environment is necessary. However, due to environmental conditions, sensor limitations, and occlusions, this is not always possible from a single point of view. To address this issue, collective perception is an effective method. Realistic and large-scale datasets are essential for training and evaluating collective perception methods. This paper provides the first comprehensive technical review of collective perception datasets in the context of autonomous driving. The survey analyzes existing V2V and V2X datasets, categorizing them based on different criteria such as sensor modalities, environmental conditions, and scenario variety. The focus is on their applicability for the development of connected automated vehicles. This study aims to identify the key criteria of all datasets and to present their strengths, weaknesses, and anomalies. Finally, this survey concludes by making recommendations regarding which dataset is most suitable for collective 3D object detection, tracking, and semantic segmentation.
Collective PV-RCNN: A Novel Fusion Technique using Collective Detections for Enhanced Local LiDAR-Based Perception
Sep 11, 2023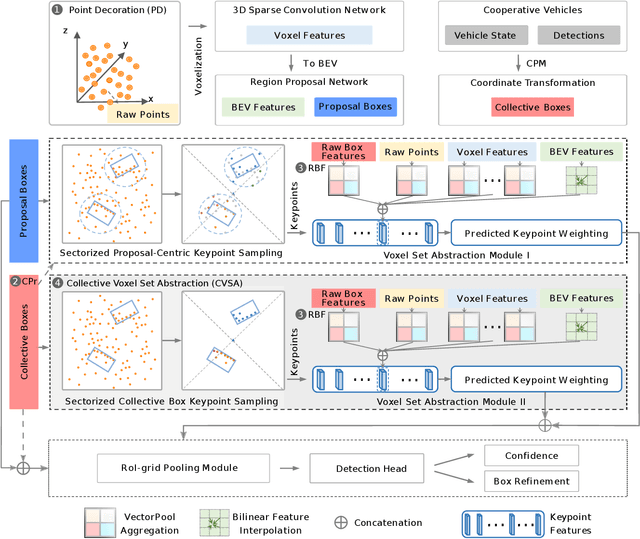
Comprehensive perception of the environment is crucial for the safe operation of autonomous vehicles. However, the perception capabilities of autonomous vehicles are limited due to occlusions, limited sensor ranges, or environmental influences. Collective Perception (CP) aims to mitigate these problems by enabling the exchange of information between vehicles. A major challenge in CP is the fusion of the exchanged information. Due to the enormous bandwidth requirement of early fusion approaches and the interchangeability issues of intermediate fusion approaches, only the late fusion of shared detections is practical. Current late fusion approaches neglect valuable information for local detection, this is why we propose a novel fusion method to fuse the detections of cooperative vehicles within the local LiDAR-based detection pipeline. Therefore, we present Collective PV-RCNN (CPV-RCNN), which extends the PV-RCNN++ framework to fuse collective detections. Code is available at https://github.com/ekut-es