 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Child-Robot Interaction in Individual and Group settings in India
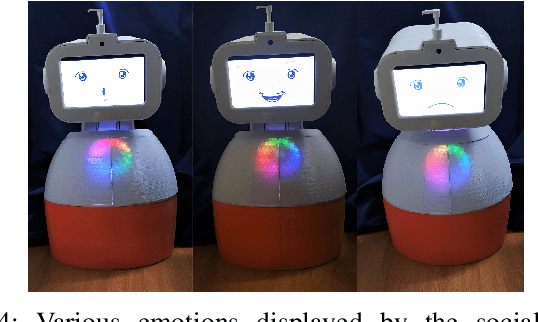
Jun 04, 2024This study evaluates the effectiveness of child-robot interactions with the HaKsh-E social robot in India, examining both individual and group interaction settings. The research centers on game-based interactions designed to teach hand hygiene to children aged 7-11. Utilizing video analysis, rubric assessments, and post-study questionnaires, the study gathered data from 36 participants. Findings indicate that children in both settings developed positive perceptions of the robot in terms of the robot's trustworthiness, closeness, and social support. The significant difference in the interaction level scores presented in the study suggests that group settings foster higher levels of interaction, potentially due to peer influence and collaborative dynamics. While both settings showed significant improvements in learning outcomes, the individual setting had more pronounced learning gains. This suggests that personal interactions with the robot might lead to deeper or more effective learning experiences. Consequently, this study concludes that individual interaction settings are more conducive for focused learning gains, while group settings enhance interaction and engagement.
Handwashing Action Detection System for an Autonomous Social Robot
Oct 27, 2022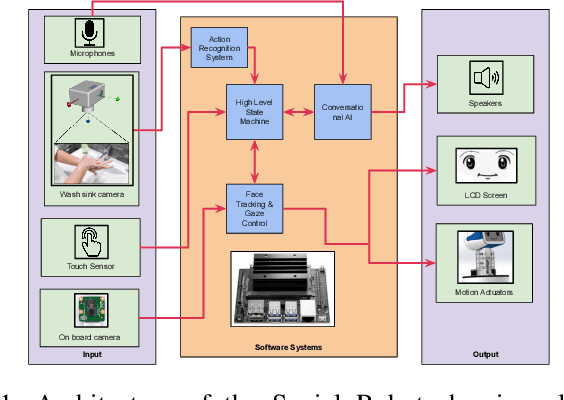
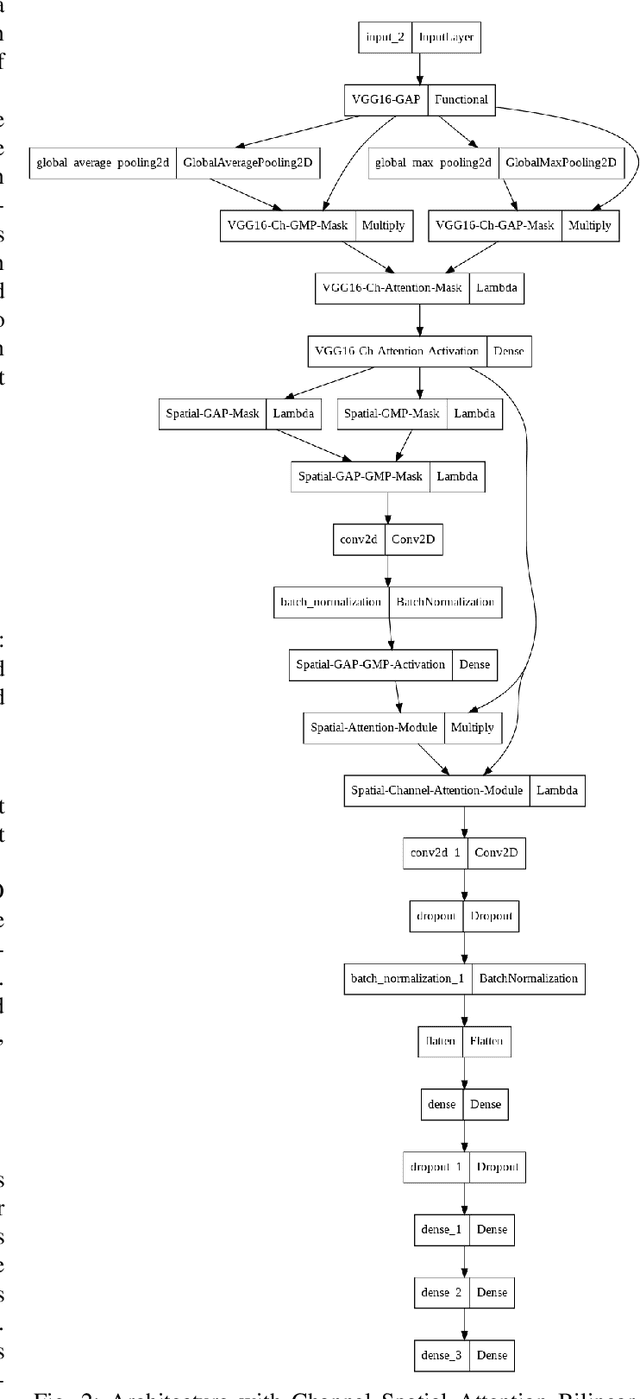
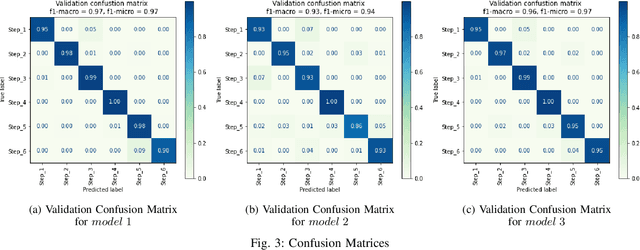
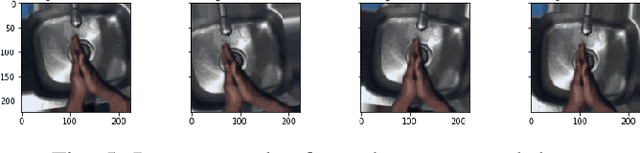
Young children are at an increased risk of contracting contagious diseases such as COVID-19 due to improper hand hygiene. An autonomous social agent that observes children while handwashing and encourages good hand washing practices could provide an opportunity for handwashing behavior to become a habit. In this article, we present a human action recognition system, which is part of the vision system of a social robot platform, to assist children in developing a correct handwashing technique. A modified convolution neural network (CNN) architecture with Channel Spatial Attention Bilinear Pooling (CSAB) frame, with a VGG-16 architecture as the backbone is trained and validated on an augmented dataset. The modified architecture generalizes well with an accuracy of 90% for the WHO-prescribed handwashing steps even in an unseen environment. Our findings indicate that the approach can recognize even subtle hand movements in the video and can be used for gesture detection and classification in social robotics.
Exploring Collaborative Game Play with Robots to Encourage Good Hand Hygiene Practises among Children
Jun 17, 2022

This paper presents the design, implementation, and evaluation of a novel collaborative educational game titled "Land of Hands", involving children and a customized social robot that we designed (HakshE). Through this gaming platform, we aim to teach proper hand hygiene practises to children and explore the extent of interactions that take place between a pro-social robot and children in such a setting. We blended gamification with Computers as Social Actors (CASA) paradigm to model the robot as a social actor or a fellow player in the game. The game was developed using Godot's 2D engine and Alice 3. In this study, 32 participants played the game online through a video teleconferencing platform Zoom. To understand the influence a pro-social robot's nudges has on children's interactions, we split our study into two conditions: With-Nudges and Without-Nudges. Detailed analysis of rubrics and video analyses of children's interactions show that our platform helped children learn good hand hygiene practises. We also found that using a pro-social robot creates enjoyable interactions and greater social engagement between the children and the robot although learning itself wasn't influenced by the pro-sociality of the robot.