 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Segmentation on Swiss3DCities: A Benchmark Study on Aerial Photogrammetric 3D Pointcloud Dataset
Dec 23, 2020
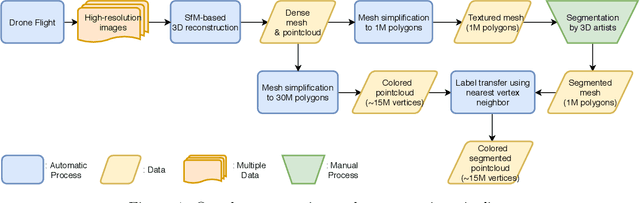
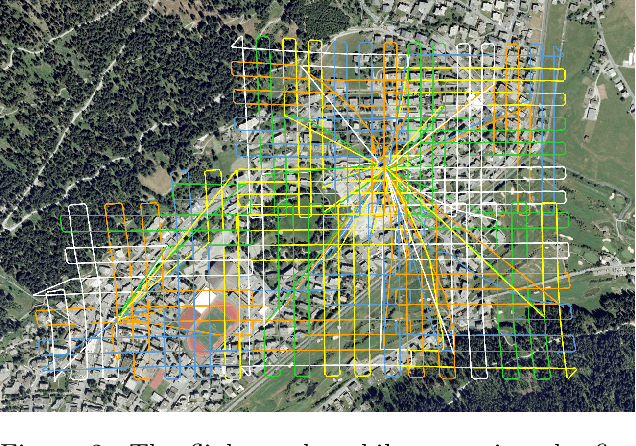

We introduce a new outdoor urban 3D pointcloud dataset, covering a total area of 2.7 $km^2$, sampled from three Swiss cities with different characteristics. The dataset is manually annotated for semantic segmentation with per-point labels, and is built using photogrammetry from images acquired by multirotors equipped with high-resolution cameras. In contrast to datasets acquired with ground LiDAR sensors, the resulting point clouds are uniformly dense and complete, and are useful to disparate applications, including autonomous driving, gaming and smart city planning. As a benchmark, we report quantitative results of PointNet++, an established point-based deep 3D semantic segmentation model; on this model, we additionally study the impact of using different cities for model generalization.