 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXDomainBench: Diagnosing Reasoning Collapse in High-Dimensional Scientific Knowledge Composition
May 14, 2026Large Language Models (LLMs) are increasingly deployed for knowledge synthesis, yet their capacity for compositional generalization in scientific knowledge remains under-characterized. Existing benchmarks primarily focus on single-turn restricted scenarios, failing to capture the capability boundaries exposed by real-world interactive scientific workflows. To address this, we introduce XDomainBench, a diagnostic benchmark for interactive interdisciplinary scientific reasoning. We formalize the composition order and mixture structure to enable systematic stress-testing from single-discipline to inter-disciplinary, comprising 8,598 interactive sessions across 20 domains and 4 task categories, with 8 realistic trajectory patterns covering difficulty and domain-mixture dynamics, simulating real AI4S scenarios. Large-scale evaluation of LLMs reveals a systematic reasoning collapse as composition order increases, stemming from two root causes: (i) direct difficulty increases induced by domain composition, and (ii) indirect interaction-amplified failures where trajectory patterns trigger error accumulation, reasoning breaks, and domain confusion, ultimately leading to session collapse.
ICON: Indirect Prompt Injection Defense for Agents based on Inference-Time Correction
Feb 24, 2026Large Language Model (LLM) agents are susceptible to Indirect Prompt Injection (IPI) attacks, where malicious instructions in retrieved content hijack the agent's execution. Existing defenses typically rely on strict filtering or refusal mechanisms, which suffer from a critical limitation: over-refusal, prematurely terminating valid agentic workflows. We propose ICON, a probing-to-mitigation framework that neutralizes attacks while preserving task continuity. Our key insight is that IPI attacks leave distinct over-focusing signatures in the latent space. We introduce a Latent Space Trace Prober to detect attacks based on high intensity scores. Subsequently, a Mitigating Rectifier performs surgical attention steering that selectively manipulate adversarial query key dependencies while amplifying task relevant elements to restore the LLM's functional trajectory. Extensive evaluations on multiple backbones show that ICON achieves a competitive 0.4% ASR, matching commercial grade detectors, while yielding a over 50% task utility gain. Furthermore, ICON demonstrates robust Out of Distribution(OOD) generalization and extends effectively to multi-modal agents, establishing a superior balance between security and efficiency.
Oblivionis: A Lightweight Learning and Unlearning Framework for Federated Large Language Models
Aug 12, 2025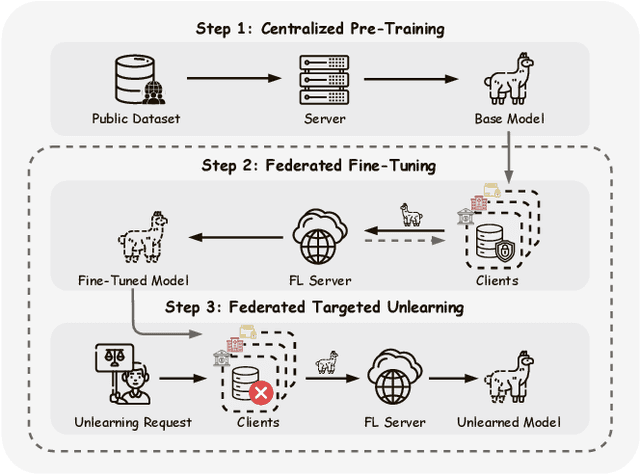
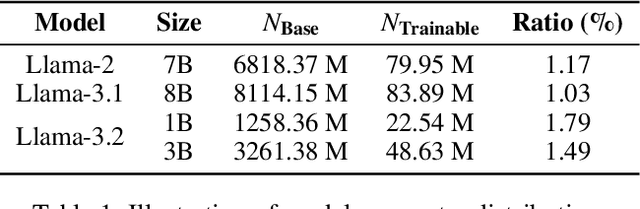
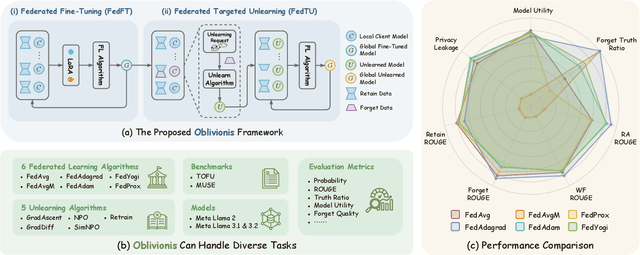
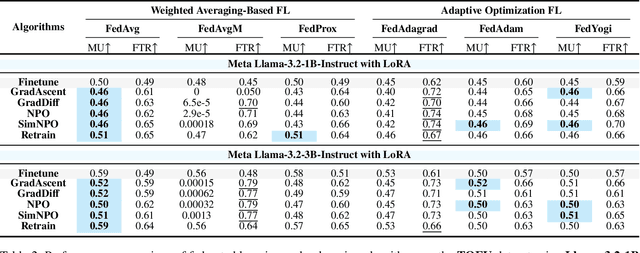
Large Language Models (LLMs) increasingly leverage Federated Learning (FL) to utilize private, task-specific datasets for fine-tuning while preserving data privacy. However, while federated LLM frameworks effectively enable collaborative training without raw data sharing, they critically lack built-in mechanisms for regulatory compliance like GDPR's right to be forgotten. Integrating private data heightens concerns over data quality and long-term governance, yet existing distributed training frameworks offer no principled way to selectively remove specific client contributions post-training. Due to distributed data silos, stringent privacy constraints, and the intricacies of interdependent model aggregation, federated LLM unlearning is significantly more complex than centralized LLM unlearning. To address this gap, we introduce Oblivionis, a lightweight learning and unlearning framework that enables clients to selectively remove specific private data during federated LLM training, enhancing trustworthiness and regulatory compliance. By unifying FL and unlearning as a dual optimization objective, we incorporate 6 FL and 5 unlearning algorithms for comprehensive evaluation and comparative analysis, establishing a robust pipeline for federated LLM unlearning. Extensive experiments demonstrate that Oblivionis outperforms local training, achieving a robust balance between forgetting efficacy and model utility, with cross-algorithm comparisons providing clear directions for future LLM development.
Object Detection in the Context of Mobile Augmented Reality
Aug 15, 2020In the past few years, numerous Deep Neural Network (DNN) models and frameworks have been developed to tackle the problem of real-time object detection from RGB images. Ordinary object detection approaches process information from the images only, and they are oblivious to the camera pose with regard to the environment and the scale of the environment. On the other hand, mobile Augmented Reality (AR) frameworks can continuously track a camera's pose within the scene and can estimate the correct scale of the environment by using Visual-Inertial Odometry (VIO). In this paper, we propose a novel approach that combines the geometric information from VIO with semantic information from object detectors to improve the performance of object detection on mobile devices. Our approach includes three components: (1) an image orientation correction method, (2) a scale-based filtering approach, and (3) an online semantic map. Each component takes advantage of the different characteristics of the VIO-based AR framework. We implemented the AR-enhanced features using ARCore and the SSD Mobilenet model on Android phones. To validate our approach, we manually labeled objects in image sequences taken from 12 room-scale AR sessions. The results show that our approach can improve on the accuracy of generic object detectors by 12% on our dataset.