 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePassive iFIR filters for data-driven velocity control in robotics
Mar 31, 2026We present a passive, data-driven velocity control method for nonlinear robotic manipulators that achieves better tracking performance than optimized PID with comparable design complexity. Using only three minutes of probing data, a VRFT-based design identifies passive iFIR controllers that (i) preserve closed-loop stability via passivity constraints and (ii) outperform a VRFT-tuned PID baseline on the Franka Research 3 robot in both joint-space and Cartesian-space velocity control, achieving up to a 74.5% reduction in tracking error for the Cartesian velocity tracking experiment with the most demanding reference model. When the robot end-effector dynamics change, the controller can be re-learned from new data, regaining nominal performance. This study bridges learning-based control and stability-guaranteed design: passive iFIR learns from data while retaining passivity-based stability guarantees, unlike many learning-based approaches.
Distributed Virtual Model Control for Scalable Human-Robot Collaboration in Shared Workspace
Feb 19, 2026We present a decentralized, agent agnostic, and safety-aware control framework for human-robot collaboration based on Virtual Model Control (VMC). In our approach, both humans and robots are embedded in the same virtual-component-shaped workspace, where motion is the result of the interaction with virtual springs and dampers rather than explicit trajectory planning. A decentralized, force-based stall detector identifies deadlocks, which are resolved through negotiation. This reduces the probability of robots getting stuck in the block placement task from up to 61.2% to zero in our experiments. The framework scales without structural changes thanks to the distributed implementation: in experiments we demonstrate safe collaboration with up to two robots and two humans, and in simulation up to four robots, maintaining inter-agent separation at around 20 cm. Results show that the method shapes robot behavior intuitively by adjusting control parameters and achieves deadlock-free operation across team sizes in all tested scenarios.
A Neuromorphic Architecture for Scalable Event-Based Control
Nov 14, 2025This paper introduces the ``rebound Winner-Take-All (RWTA)" motif as the basic element of a scalable neuromorphic control architecture. From the cellular level to the system level, the resulting architecture combines the reliability of discrete computation and the tunability of continuous regulation: it inherits the discrete computation capabilities of winner-take-all state machines and the continuous tuning capabilities of excitable biophysical circuits. The proposed event-based framework addresses continuous rhythmic generation and discrete decision-making in a unified physical modeling language. We illustrate the versatility, robustness, and modularity of the architecture through the nervous system design of a snake robot.
Dissipative iFIR filters for data-driven design
Nov 29, 2024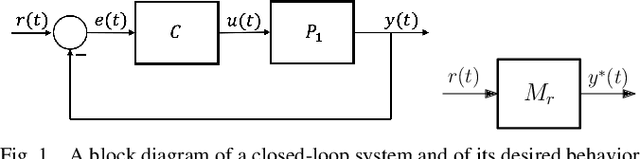
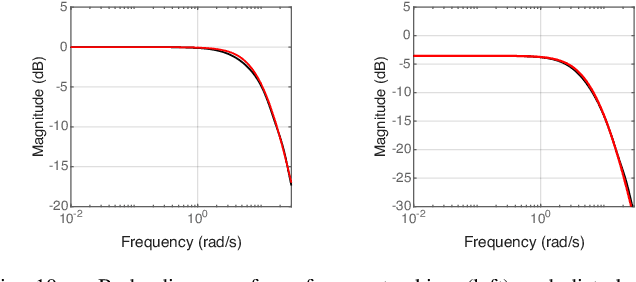
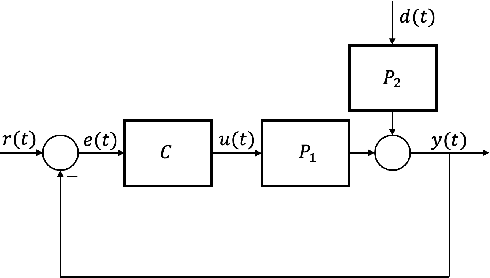
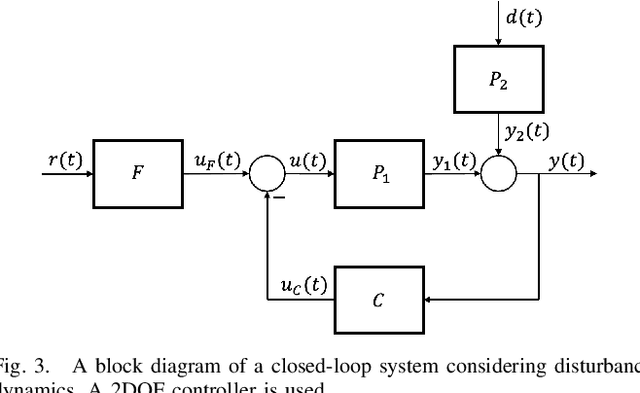
We tackle the problem of providing closed-loop stability guarantees with a scalable data-driven design. We combine virtual reference feedback tuning with dissipativity constraints on the controller for closed-loop stability. The constraints are formulated as a set of linear inequalities in the frequency domain. This leads to a convex problem that is scalable with respect to the length of the data and the complexity of the controller. An extension of virtual reference feedback tuning to include disturbance dynamics is also discussed. The proposed data-driven control design is illustrated by a soft gripper impedance control example.
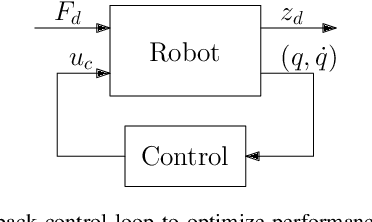
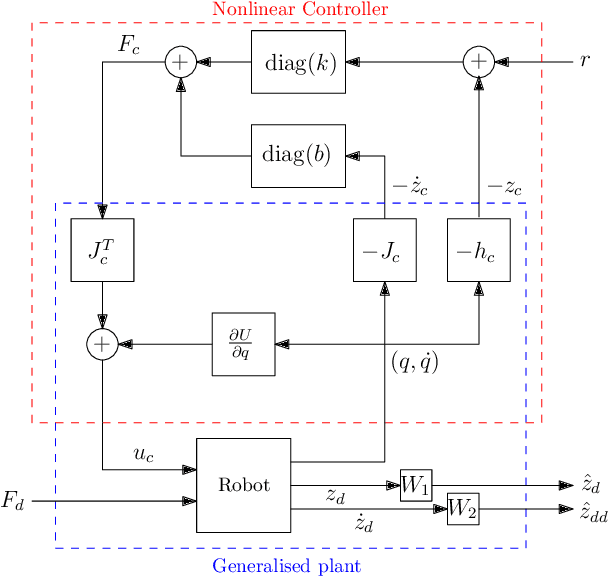
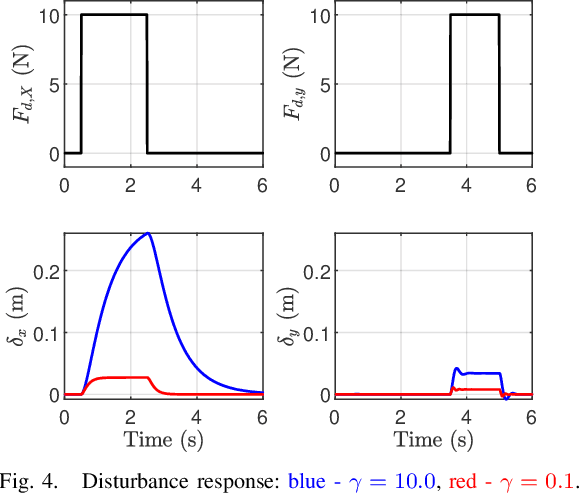
Optimal Virtual Model Control for Robotics: Design and Tuning of Passivity-Based Controllers
Nov 10, 2024Passivity-based control is a cornerstone of control theory and an established design approach in robotics. Its strength is based on the passivity theorem, which provides a powerful interconnection framework for robotics. However, the design of passivity-based controllers and their optimal tuning remain challenging. We propose here an intuitive design approach for fully actuated robots, where the control action is determined by a `virtual-mechanism' as in classical virtual model control. The result is a robot whose controlled behavior can be understood in terms of physics. We achieve optimal tuning by applying algorithmic differentiation to ODE simulations of the rigid body dynamics. Overall, this leads to a flexible design and optimization approach: stability is proven by passivity of the virtual mechanism, while performance is obtained by optimization using algorithmic differentiation.
Passive iFIR filters for data-driven control
Mar 11, 2024



We consider the design of a new class of passive iFIR controllers given by the parallel action of an integrator and a finite impulse response filter. iFIRs are more expressive than PID controllers but retain their features and simplicity. The paper provides a model-free data-driven design for passive iFIR controllers based on virtual reference feedback tuning. Passivity is enforced through constrained optimization (three different formulations are discussed). The proposed design does not rely on large datasets or accurate plant models.
A Generalized Approach to Impedance Control Design for Robotic Minimally Invasive Surgery
Dec 21, 2022Energy based control methods are at the core of modern robotic control algorithms. In this paper we present a general approach to virtual model/mechanism control, which is a powerful design tool to create energy based controllers. We present two novel virtual-mechanisms designed for robotic minimally invasive surgery, which control the position of a surgical instrument while passing through an incision. To these virtual mechanisms we apply the parameter tuning method of Larby and Forni 2022, which optimizes for local performance while ensuring global stability.
A Passivity Preserving H-infinity Synthesis Technique for Robot Control
Dec 20, 2022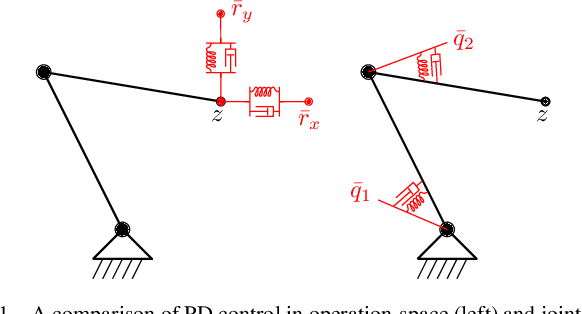
Most impedance control schemes in robotics implement a desired passive impedance, allowing for stable interaction between the controlled robot and the environment. However, there is little guidance on the selection of the desired impedance. In general, finding the best stiffness and damping parameters is a challenging task. This paper contributes to this problem by connecting impedance control to robust control, with the goal of shaping the robot performances via feedback. We provide a method based on linear matrix inequalities with sparsity constraints to derive impedance controllers that satisfy a H-infinity performance criterion. Our controller guarantees passivity of the controlled robot and local performances near key poses.