 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchitecture and evaluation protocol for transformer-based visual object tracking in UAV applications
Mar 04, 2026Object tracking from Unmanned Aerial Vehicles (UAVs) is challenged by platform dynamics, camera motion, and limited onboard resources. Existing visual trackers either lack robustness in complex scenarios or are too computationally demanding for real-time embedded use. We propose an Modular Asynchronous Tracking Architecture (MATA) that combines a transformer-based tracker with an Extended Kalman Filter, integrating ego-motion compensation from sparse optical flow and an object trajectory model. We further introduce a hardware-independent, embedded oriented evaluation protocol and a new metric called Normalized time to Failure (NT2F) to quantify how long a tracker can sustain a tracking sequence without external help. Experiments on UAV benchmarks, including an augmented UAV123 dataset with synthetic occlusions, show consistent improvements in Success and NT2F metrics across multiple tracking processing frequency. A ROS 2 implementation on a Nvidia Jetson AGX Orin confirms that the evaluation protocol more closely matches real-time performance on embedded systems.
Artificial Intellgence -- Application in Life Sciences and Beyond. The Upper Rhine Artificial Intelligence Symposium UR-AI 2021
Dec 10, 2021

The TriRhenaTech alliance presents the accepted papers of the 'Upper-Rhine Artificial Intelligence Symposium' held on October 27th 2021 in Kaiserslautern, Germany. Topics of the conference are applications of Artificial Intellgence in life sciences, intelligent systems, industry 4.0, mobility and others. The TriRhenaTech alliance is a network of universities in the Upper-Rhine Trinational Metropolitan Region comprising of the German universities of applied sciences in Furtwangen, Kaiserslautern, Karlsruhe, Offenburg and Trier, the Baden-Wuerttemberg Cooperative State University Loerrach, the French university network Alsace Tech (comprised of 14 'grandes \'ecoles' in the fields of engineering, architecture and management) and the University of Applied Sciences and Arts Northwestern Switzerland. The alliance's common goal is to reinforce the transfer of knowledge, research, and technology, as well as the cross-border mobility of students.
Artificial Intelligence : from Research to Application ; the Upper-Rhine Artificial Intelligence Symposium (UR-AI 2019)
Mar 20, 2019

The TriRhenaTech alliance universities and their partners presented their competences in the field of artificial intelligence and their cross-border cooperations with the industry at the tri-national conference 'Artificial Intelligence : from Research to Application' on March 13th, 2019 in Offenburg. The TriRhenaTech alliance is a network of universities in the Upper Rhine Trinational Metropolitan Region comprising of the German universities of applied sciences in Furtwangen, Kaiserslautern, Karlsruhe, and Offenburg, the Baden-Wuerttemberg Cooperative State University Loerrach, the French university network Alsace Tech (comprised of 14 'grandes \'ecoles' in the fields of engineering, architecture and management) and the University of Applied Sciences and Arts Northwestern Switzerland. The alliance's common goal is to reinforce the transfer of knowledge, research, and technology, as well as the cross-border mobility of students.
A Synchronized Stereo and Plenoptic Visual Odometry Dataset
Aug 26, 2018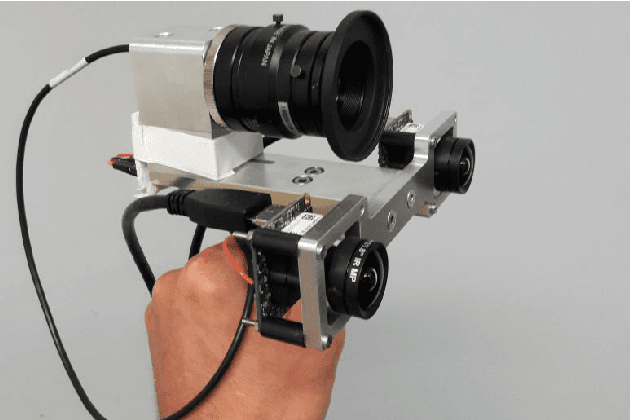
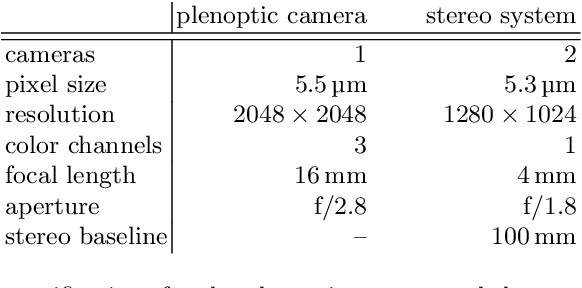
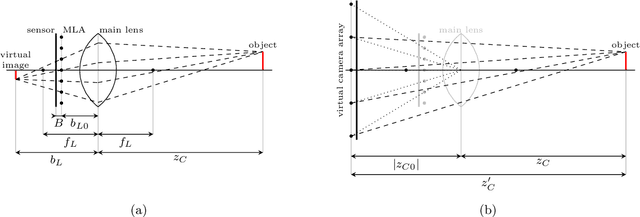
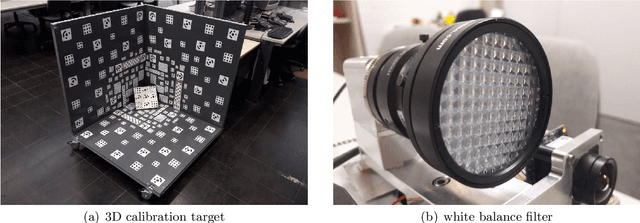
We present a new dataset to evaluate monocular, stereo, and plenoptic camera based visual odometry algorithms. The dataset comprises a set of synchronized image sequences recorded by a micro lens array (MLA) based plenoptic camera and a stereo camera system. For this, the stereo cameras and the plenoptic camera were assembled on a common hand-held platform. All sequences are recorded in a very large loop, where beginning and end show the same scene. Therefore, the tracking accuracy of a visual odometry algorithm can be measured from the drift between beginning and end of the sequence. For both, the plenoptic camera and the stereo system, we supply full intrinsic camera models, as well as vignetting data. The dataset consists of 11 sequences which were recorded in challenging indoor and outdoor scenarios. We present, by way of example, the results achieved by state-of-the-art algorithms.